��Ҏ��ģ��ۙ������늄әC�ٶȿ���ϵ�y������(1)
�̘俵 ����÷ (�����I���I��W150001)
��ժ Ҫ��ᘌ��ŷ�ϵ�y���١��߾���ۙ�o��Ŀ��ֵ�@һĿ�ģ��������pi+����h�������ޕr�g���Ƶ�Ҏ��ģ��ۙϵ�y��������늄әC�ٶȿ���ϵ�y������Y���������@һ������������늄әC����׃�����D�ظɔ_��푑���Ӱ푾������@��Ч�������к���ʹ�÷Ǿ��ԵĜ���h�������ޕr�g��������ϵ�y�ĎN���F��ʽ�����c��
���� �~��Ҏ��ģ��ۙϵ�y늄әC�ٶȿ�������
1���ޕr�g��������ϵ�y�Č�
�F��ʽ
�ڱ���Ĺ��I�����У�Ҫ����Ќ����Mݔ���Ŀ��ֵ���^�_��푑�����������ܣ��錍�F�@��Ҫ������˸��N���Ʒ�������ʹ�÷Ǿ��ԵĜ���h�������ޕr�g�������������еķ���֮һ��
ԓ����������λ�ÿ���ϵ�y������ˌ�����h�����뵽�ٶȷ���ϵ�y�еĜ��������Ʒ��������ٶȿ���ϵ�y���t���Ì��^ȥpi�����е�pԪ���ÓQ�ɜ���h���Ĝ���e�ֿ��Ʒ�ʽ���Լ���pi�����в��Ü���h����pi+����h�����ƶ��N��ʽ���@Щ���ޕr�g��������ϵ�y�c�^ȥ�ľ��Կ���ϵ�y���^�����������˜���h����������Է���،��F�����Mݔ�롢푑��졢���^�_���������ܡ��@�N���ޕr�g�������ƌ��F��ǰ��l���Ǻ��Կ��ƌ���ą���׃�ӣ����ٶ��䅢�����Ƕ�ֵ�������H���ƕr�����ڿ��ƌ������Ȳ���֣������S�r�g׃�����@Щ���ޕr�g����ϵ�y��푑��������څ�����׃�����������@�������ڌ����ƌ���ģ�ͻ��r���Ǿ��������M���˾��Ի�̎���������˿���׃���Ą����ԣ��ڿ���ϵ�y���OӋ�r�]�п��]����׃����Ӱ푡�
�����ƅ���׃����Ӱ푣�����˾��зǾ���Ҏ��ģ�͵�Ҏ��ģ��ۙϵ�y�ķ������@�Nϵ�y��Ҏ��ģ�ͺ�ۙϵ�y�����֘��ɣ�Ҏ��ģ�Ͳ����ǜ���e�ֿ��ơ��@�Nϵ�y��ʹ�څ���׃���rҲ�ܵõ����õ�푑����ɔ_��Ӱ�Ҳ�@�����ƣ����ǣ��@�Nϵ�y��������Ҏ��ģ�͆β�푑��������r�gȡ�Q�ڿ��ƌ��������Ҫ�����ϵ�y�������r�g�r���Բ���ȡ�ÝM��Y����
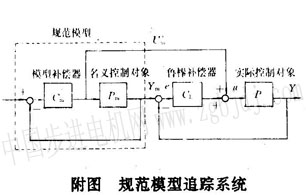
���˸���������������ϵ�y�����ԡ�����Ҏ��ģ��ۙϵ�y��늄әC����ϵ�y�еđ��ã����Mһ���lչ����pi+����h������Ҏ��ģ�͵�ģ��ۙϵ�y���總�D��ʾ��
�ڸ��D��ʾ��ϵ�y�У�Ҏ��ģ���a������pi�����мӜ���h�����{���@���a�������Ϳɵõ�Ҏ��ģ��ݔ����ϣ������������푑���������H���ƌ����������ƌ�����һ�£���ôۙϵ�y��푑��ͺ�Ҏ��ģ�͵�푑���ͬ�����H���ƌ���׃�������иɔ_��ʧ�棬�t��ϵ�y�������a����������Ӱ푣��Ķ��ڱ��Cϵ�y�����Ե�ͬ�r��ۙ�����푑���
���Ї��@��pi+����h����Ҏ��ģ�͵�Ҏ��ģ��ۙϵ�y���ɵ�늄әC�ٶȿ���ϵ�y�����ģ���B�@�Nϵ�y��ԭ�������c�����m��������m��B����һ���ٶȿ���ϵ�y�������f�����ޕr�g������ԭ�����Լ����ޕr�g��������ϵ�y��ʹ�õķǾ��Ԝ���h���Ĺ���ԭ������ֱ���ŷ�늄әC����ƌ���ķ��棬��C���ޕr�g����ԭ������Ч�ԣ��Լ�̽ӑ���ƌ���׃��ϵ�y��Ӱ푣��������ƿ��ƌ���׃����Ӱ푶������Ҏ��ģ��ۙϵ�y��ԭ�����M�����������ɶȿ���ϵ�y�OӋ��Փ��h������Փ��ӑՓ���NҎ��ģ�͵�Ҏ��ģ��ϵ�y���OӋ������Փ��ʹ�÷Ǿ���Ҏ��ģ�͵�Ҏ��ģ��ۙϵ�y��늄әC�ٶȿ����еđ��ã���ֱ���ŷ�늄әC����ƌ����OӋ�����a�������ɷ����f��Ҏ��ģ��ۙϵ�y����Ч�ԡ�
(���m)
�M�룺 |