���Ž����ŷ����g
��һ�v����ͬ��늄әC���ƻ���ԭ��
�߲� �� ���F (�����I���I��W150001)
�����߰������@����ͬ��늄әC�Ŀ�
�Ƽ��gչ�_������pmsm���ŷ�늙C�Ľ����ŷ�ϵ�y��������M���^���µ��f�����v���֞��Ă����}�����ݰ�������ͬ��늄әC���ƵĻ���ԭ�����ŷ����������OӋ���������Ʋ��ԡ��ŷ�ϵ�y�Ę��ɼ����F��pmsm�ŷ����g�đ��ã�ּ��ʹ�x�ߌ����Ž����ŷ����g��һ��ϵ�y���˽⡣
�S���⒡�ϡ�����S�F����������Ų��ϵij��F������늙C�ںܴ�̶��ϵõ��˰lչ�����ƣ����ڸ��N���ϡ��������ŷ��I������ŷ���uȡ��Һ���ŷ��ij����У������Ž���늙C�����ŷ�늙C���ŷ�ϵ�yԽ��Խ�õ��˂�����A����������H������ͨ�����ŷ�ϵ�y�Թ����á��S�o����ȃ��c�����Ҽ����ֱ���ŷ�ϵ�y���Ѓ����Ŀ������ԡ�
�����Ž����ŷ�ϵ�y�У������^���ձ�����Ž����ŷ�늙C��Ҫ�Ѓ��һ�oˢֱ��늄әC����һ�����ͬ��늄әC��ǰ�߲��÷�������ӣ��������������Ҳ�����ӡ��M��bdcm�ŷ�ϵ�y���D��λ�Â��������Ρ��ɱ��^�͡����������ʸߡ����ƺ��εȃ��c����������ԭ���ϴ��ڹ���ȱ�ݣ�ʹ���D���}���^���F�ĸ��ӓp���^�����ֻ�m��һ�㾫�ȼ�����Ҫ��Ĉ��ϣ���pmsm�ŷ�ϵ�y�ܿ˷�bdcmϵ�y�IJ��㣬�����ڸ߾��ȡ�������Ҫ��Ĉ��ϡ�Ŀǰ�����⌦���Ž����ŷ����g���о���Ҫ������pmsm�ŷ�ϵ�y�ϣ���˱��v�������@pmsm�����Ž����ŷ����g�M���U����
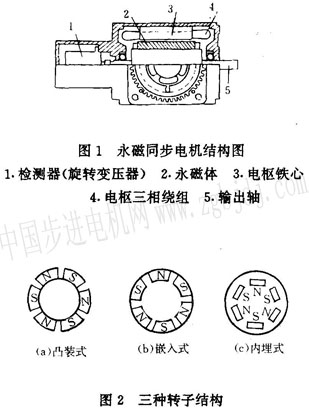
1����ͬ��늄әC�����Y��
����ͬ��늄әC�cһ��Б�ʽͬ���C�ڶ��ӽY������һ�µģ��������@�M���F�Ę��ɣ���늘��@�M���ԡ�y���B�ӣ����D�ӽY���ϣ�pmsm���������wȡ���Б�ʽͬ���C�Ą���@�M���Ķ�ʡȥ�˄�ž�Ȧ�����h���ˢ���c��ͨ늙C��ȣ�pmsm߀����b���D�������w�ŘOλ�Ùz�y�����Á�z�y�ŘOλ�ã��Ķ��Դˌ�늘�����M�п��ƣ��_����pmsm�ŷ����Ƶ�Ŀ�ġ��鱣�Cϵ�y���ȼ��\���|������������D׃��������pmsm���D��λ�Ùz�y�����cpmsm�D��ͬ�S�B�ӣ��D1������ͬ��늙C�ĽY���D��
���������w���D���ϰ��bλ�õIJ�ͬ��pmsm�D�ӿɷ֞�����bʽ��Ƕ��ʽ�̓���ʽ����D2��ʾ��
�D2a��b�ɷN�Y���ɜpС�D��ֱ�����Ķ������D�ӑT�����������wֱ��ճ���D�S��߀�ɫ@�õ�늸У�����늙C�ӑB���ܵĸ��ƣ�һ��pmsm������@�ɷN��ʽ���D�ӽY��������ʽ�D���nj������w�b���D���F�ăȲ������ęC�����ȸߣ���·��϶С���m�����ſ��Ƶĸ����\�Ј��ϡ�
����ڿ��ƣ�pmsm�Ķ����@�M�����ö̾�ֲ��@�M����϶�ň��OӋ�����Ҳ����Ԯa�����Ҳ���늄ݡ�
2 pmsm���ƻ���ԭ��
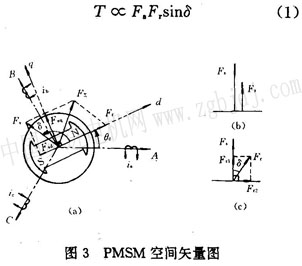
�κ�늙C�{�ٿ��Ƶ��P�I�nj����D�صĿ��ƣ��D����ͨ�^�D�ظ�׃�ģ�����pmsmҲ��һ�ӡ���pmsm�ŷ�ϵ�y�У��oՓ���ٶ��ŷ�����߀��λ���ŷ����ƣ������D���錦pmsm���D�ؿ��ƣ��������ŷ����g�У��D�ؿ����ǂ����c������pmsm���ƵĻ���ԭ�����䌍�|����pmsm���D�ؿ���ԭ�������˸��õ��U���@һ����ԭ�����ȷ���pmsm�D�خa��ԭ�����D3�Ǿ���һ���ŘO��pmsm���gʸ���D��
�D��fr���D�Ӵńݿ��gʸ���������D���������w��ţ���fr=const��fs�ǽo����ͨ�������ҽ���늕r�a���Ķ��Ӵńݣ�fr�cfs�ĊA�ǦĞ��D�ؽǡ������D�ӴŘO�S���غϣ�����=0���=�Еr���ɴŘOϵ�y̎�ڷ�������ƽ���B����=0�Ƿ���ƽ���B(Ҋ�D3b)���˕rֻ����ƽ������������o�κ��D
��څ�ݣ���=�Еr�Dz�����ƽ���B�����Д[�Ӽ��؏͵���=0��B����Ҋ�@�ɷN��B�£�늙C�������D����ʹ늙C�B�m���D����횱��֦ġ�0(Ҋ�D3c)���@�Ӳ��ܮa���D�غ;S���\�ӡ�����늴ŌWԭ����늙C�D�������ڶ����D�Ӵń�ʸ���ķ�ֵ�c��A�Ǧĵ����ҵij˷e������
��Ҋ����=90o�r��t��****ֵ���ڌ�pmsm�Ŀ����У���ʹfs��fr���ܵõ�****���D��ݔ�����ڈD3a�У������D���Ͻ�����D��ʾ��dq�Sϵ�����0��d�S�c����a���@�M�S���A�ǣ����ඨ������քe��ia��ib��ic���t��
w1�鶨��һ���@�M�є�������d�S�酢���� |