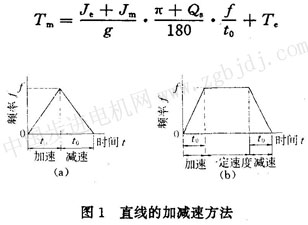
��늙C���x��
��һ�v���M늄әCϵ�y���x��(1)
����÷ �̘俵(�����I���I��W150001)
1����
�ڹ��I���a�O���У�ʹ�����������׃���Ą����Cе������ý�w�IJ�ͬ��Ŀǰ���õ���늚�ʽ��Ԫ�����͉�ʽԪ�����≺ʽԪ����ˮ��ʽԪ�����Լ�����Ԫ���ĸ�M�ϡ�
Ŀǰ���S�����ϡ�Ӌ��C��������ӌW�ȌW�Ƶİlչ����늚���Ԫ����ʹ������U����������Ʒ�Ȯa�I�Cе�У�������ʹ��늚�ʽ��Ԫ����
�ڹ��I���r�����У���늚���Ԫ����Ҫ��Խ��Խ�ߡ��磬Ҫ�����õ��ٶȿ������ԡ����_��λ�ÿ��ơ����D�ء���Ч�ʵȡ���������늙C���ڳ����C�һ�w������lչ��ʹ����Ҳ����ע���䌍���ԡ������y��ֱ��늄әC���Б�늄әC��ͬ��늄әC���⣬ֱ���ŷ�늄әC���Б�ʽ�����ŷ�늄әC��ͬ���Y�������ŷ�늄әC�����M늄әC�Լ�����طN늄әC��Ʒ�NҲԽ��Խ�࣬�������ڲ���lչ��
����늙C���ԡ�ʹ�×l�������صIJ�ͬ����θ���ؓ�d�l�����x����m��늄әC���Ķ�ʹ���OӋ��ϵ�y�ܹ������^����Ġ�B���ǏV�̼��g�ˆT���^�P�ĵĆ��}���҂���������Č��H�������R�����P�ļ��g�Y�ϣ��o����Ҫ���늚����Ԫ������늄әC���x����ϣ����늙C���g������ʹ��������������
2���M늄әC���x��
���M늄әC���ڿ����_�h��ʽ���ƶ��o�跴�������Пo�۷e��λ�`���푑�����ݔ����̖�ȃ��c���V�����ڹ��I�Ԅӻ�(fa)���k���Ԅӻ�(oa)��Ӌ��C�K�˺����O���I���M늄әCϵ�y�ǵ��͵ęC�һ�w��ϵ�y���x��r�迼�]�Cе��늴ŵȱ������ء��粽��ǡ�ؓ�d�D�ء�ؓ�d�T�����\���ٶȡ��Ӝp�ٕr�g�ȡ�������ؓ�d�T��ֱ��Ӱ푲��M늄әC�������l�ʺͼ����D�أ����������Գ��ע�⡣
2��1 ���M늄әC�Ļ���Ӌ��ʽ����Ҫ���gָ��
2��1��1���M늄әC���\�ӷ���
�x���M늄әC�Ļ���Ӌ��ʽ���Բ��M늄әC���\�ӷ��̞���A�ġ����M늄әC���\�ӷ��̞飺
ʽ��je����ؓ�d�T����kg��m2
jm�����D�ӑT����kg��m2
�̡�����ճ��Ħ��ϵ����nm��s��rad
te����ؓ�d�D�أ�nm
tm����늙C늴��D�أ�nm
�ء������ٶȣ�rad��s
g�����������ٶ�
�ں��Ԧ̦صėl���£�
ʽ�� f�������l�ʣ��}�_��s
qs��������ǣ�(o)
����D1��ʾ����ֱ���Ӝp�ٕr��
2��1��2��Ҫ���gָ��
(1)****�o�D��tjmax
****�o�D����ָ���M늄әC��Ҏ����ͨ������¾ؽ������ϵ��D��****ֵ���@�M���Խ��****�o�D��ҲԽ��ͨ�����g��������Ҏ����****�o�D����ָÿ���@�Mͨ���~������r���õ�ֵ��
(2)�����
ÿݔ��һ����}�_��̖�D���D�^�ĽǶȡ�
(3)���l����
���l���Է����Ӿ��l���Ժ��\�о��l���ԡ����Ӿ��l����ָ��һ��ؓ�d�T���£������l���Sؓ�d�D��׃�����Pϵ�������l����ָ���M늄әC�܉�ʧ�����ӵ�****�}�_�l�ʡ��\�о��l������ָ��늙C����һ��ؓ�d�\�Еr���\���l���cؓ�d�D�ص��Pϵ���\���l����ָ���M늄әC���Ӻ������}�_�B�m�������S�ֲ�ʧ����****�l�ʡ�
2��2�x��Ҫ��
���x���M늄әC�r�����ȱ��֪������ϵ�y������ָ�ˡ�
(1)�Cе����������Ҫָؓ�d�D��te��ؓ�d�T��je��
(2)�r�g����������Ҫ���ڶ��L�r�g(t1)���ٵ������l��(f2)�ȡ�
(3)�}�_��������ÿһ�}�_���M늄әC����ؓ�d���D |