��܌���늙C�yԇ��·
����÷ �� Ƽ �촺�� �̘俵�������I���I(y��)��W(xu��)150001��
1����
��늙C�Ĝyԇ�У���(j��ng)��Ҫ�M(j��n)��λ�ã���Ƕȣ����ٶȵĜyԇ����늾��a�����ڼȿ����ٶ���̖���������ֿ���λ����̖���������Ҿ��ȸߣ��o�����@������ă�(y��u)�x�ߡ��x���˂�����������ζ���Ϳ��������y��(sh��)��(j��)�ˡ�����회�����������̖�M(j��n)��̎�������ܵõ���Ҫ����Ϣ�����ڿ��к����a(ch��n)�У��Еr���]�б�Ҫ�ɴ�����һ��ϵ�y(t��ng)��һ�_�x�������̫�M�r�M��������O(sh��)Ӌ��һ�����Ό��õĹ�늾��a�����m(x��)�·������ԓ��·������һЩͨ�Ãx���O(sh��)��Ϳ������ܶ�늙C��
2ԭ�����M��
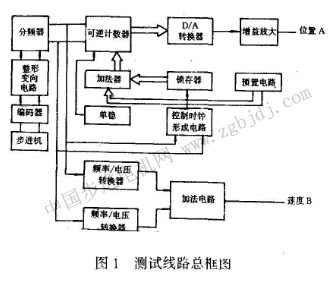
�D1���@���yԇ��·�Ŀ�D����̖����������늾��a���́�����̖�M(j��n)���A(y��)̎�����Թ���ɲ������á�λ����̖�γɲ���ؓ(f��)؟(z��)����(j��ng)�^������Ă����� ���l����̖�D(zhu��n)����늉���̖���ٶ���̖�γɲ�����Ɍ��l����̖�D(zhu��n)�Q�����늙C�ٶȵ�늉���̖���΄�(w��)�����D(zhu��n)�ٷ�����늉���ؓ(f��)��ʾ��
2.1��̖��������
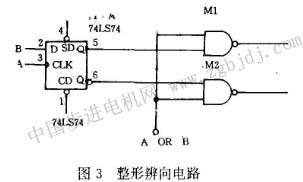
�������α����·�����l�·������늾��a����ݔ����̖���·��λ���90�ȵ���̖a��b����D2��ʾ��Ҫ�õ�����������̖��Ҫ�M(j��n)�����Ρ������ÈD3��ʾ�·���F(xi��n)��
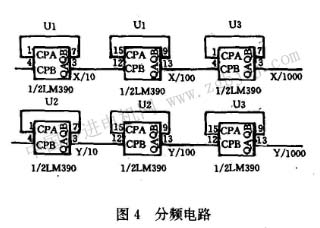
��鱻�y늙C�D(zhu��n)�ٷ�����ͬ�����þ��a��������һ���ģ���f/v�D(zhu��n)�Q�l�ʼ�Ӌ��(sh��)��λ��(sh��)���ޣ������c��ͬ���ȵľ��a������ϣ��yԇ��ͬ���ٶȣ������Է��l�·���@���ֿɸ���(j��)��Ҫ�x�ò�ͬ����(sh��)�ķ��l�����D4��һ����Ƭ�p10�M(j��n)��Ӌ��(sh��)��74ls390�M�ɵă�·1 000���l�ķ��l�����IJ�ͬ�����_�����ɵõ���ͬ�ķ��l��(sh��)����x·�������քe��ÿƬ74ls390��a�ˣ��ɵõ�10���l��100���l��1 000���l��
��ϵ�y(t��ng)���І�Ƭ�C���ɲ���8253��8254���A(y��)�Ô�(sh��)Ӌ��(sh��)���������l�������F(xi��n)������l���@�ӿɹ�(ji��)ʡӲ����
Ҳ���������Y(ji��)��(g��u)���l��������ע��оƬ�Ď����������õ�****�l�ʡ������늙C�D(zhu��n)���^�ߣ������a��Ҳ�����^�߾��ȣ��t�}�_��̖���l�ʌ��ܸߡ���늙C�D(zhu��n)�ٞ�5 000r/min�����a��һȦݔ���}�_��(sh��)��36 000���t���Ԃ���������̖�l�ʞ飺(5000/60)��36000-3mhz
2.2λ����̖�γɲ���
�c늙C�Sͬ�S�Ĺ�늾��a��ݔ���c�D(zhu��n)�ǣ����D(zhu��n)�٣����P(gu��n)����������̖����(j��ng)���α����·���x���c�D(zhu��n)�dzɱ����������}�_��̖�ͷ����}�_��̖���@��·��̖�͵�����Ӌ��(sh��)�����õ�늙Cλ�õĔ�(sh��)�����۷e��Ȼ��(j��ng)�^׃�Q׃?y��u)�ģ���������������Ŵ��{(di��o)��(ji��)�·��׃?y��u)��m���@ʾ�Ĵ���λ�õ�늉���̖��
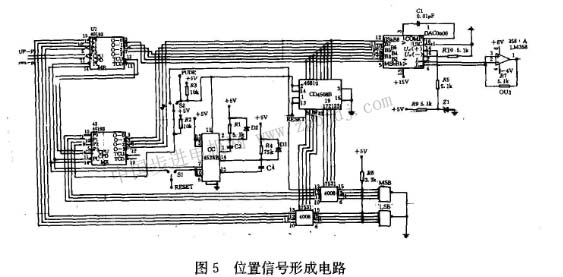
�������·߀����λ���A(y��)���·��ͨ�^8λ�_�P(gu��n)�A(y��)��һ��λ�ã��ӷ������o��λ���c�F(xi��n)λ�ã�ͨ�^�i����ӛ����Ӌ��(sh��)����(sh��)ֵ����ӣ��ɿ����}�_���ƣ�����Ӌ��(sh��)�������oӋ��(sh��)���Ô�(sh��)���η�(w��n)�·�Ǟ�ɿ��Ô�(sh��)�O(sh��)�õġ�����߀��ͨ�^��ی��F(xi��n)Ӌ��(sh��)�������㡣
ԓ����һ�����õľ�·����D5��ʾ��
����Ӌ��(sh��)���x��2��4λ�Ӝp����Ӌ��(sh��)��74ls193��4568���p4λ��(sh��)�i�������Á��i��Ӌ��(sh��)���Ĕ�(sh��)ֵ���ö���4λ��ǰ�M(j��n)λȫ����4008���ӷ�����4528���p�η�(w��n)�B(t��i)���C��ʎ����ʹӋ��(sh��)���ɿ����㡢�Ô�(sh��)�á�d/a�x��8λd/a����dac0800���ɡ�
����ԓ���־�·���ɜyԇ�c���M(j��n)늄әCλ�ã��D(zhu��n)�ǣ����P(gu��n)���Ŀ����β�푑�(y��ng)�����ྫ�ȵȡ��yԇ�r��ֻ�茢�������cԓ���־�·�Ӻá��(q��)��늙C����Ҫ���\�У���ʾ������늉����a�˿ɫ@��늙C���D(zhu��n)����̖��
2.3�ٶ���̖�γ��·
�l�ʣ�늉��D(zhu��n)�Q�������Է��l���Ĵ������������ʵă�·�}�_��̖�D(zhu��n)׃?y��u)�һ���c���ʳ����ȵ�늉���̖��Ȼ���ɼӷ��·���F(xi��n)�������Ӝp�����õ�һ��������ؓ(f��)��늉���̖��늉��Ĵ�С��ʾ�ٶȵĴ�С������ؓ(f��)��ʾ�ٶȵķ�������̖����ʾ������늉��������^�죬�yԇ늙C���ٶȡ����w��·Ҋ�D6��
|