�oˢֱ��늄�(d��ng)�C(j��)�D(zhu��n)�ٿ����ô�׃�������
�� �� (�ؑc늙C(j��)�S 630043)
1����
�S���߾��ȡ��߷�(w��n)����늙C(j��)�D(zhu��n)�ٿ���ϵ�y(t��ng)�İl(f��)չ������ϵ�y(t��ng)�ٶȷ���Ԫ���ęz�yԪ��Ҳ�ڲ�����¡���늙C(j��)�D(zhu��n)�ٿ���ϵ�y(t��ng)�У��D(zhu��n)�ٷ������}�_��(sh��)���࣬ϵ�y(t��ng)f/v׃�Q���ķֱ���Ҳ���ߣ�늙C(j��)�D(zhu��n)�ٵĿ��ƾ���ҲԽ�ߡ�Ŀǰ���z�y늙C(j��)�D(zhu��n)�ٵęz�yԪ�������N��һ�N�dz��õ��l�ʰl(f��)����(fg)����������������β��@�M���g��̫С���ܵ����ƣ����ṩ��������늙C(j��)�D(zhu��n)�ٵķ�����̖(h��o)�l��Ҳ��(hu��)��һ�����ơ���һ�N�ǹ�늾��a�������z�y��ݔ�����ǔ�(sh��)�����������ṩ�^����}�_��(sh��)������ֱ��ʸߣ������ڽY(ji��)��(g��u)��(f��)�s����a�P���쾫�ȸߣ��Ҍ�(du��)ʹ�íh(hu��n)���l����Ҫ���L���\(y��n)�Еr(sh��)�ľS�o(h��)����ʹ���đ�(y��ng)���ܵ������ơ������N�Ǵ�׃������������Qmr��������mr�����������˴�׃��Ԫ�������QmrԪ�����@�NԪ�������ֵ�S�ň���׃����׃�����ʷQ��׃��mrԪ��������****���c(di��n)�ǽY(ji��)��(g��u)���Σ����췽�㣬�m��С���p���������ܭh(hu��n)���l����Ӱ푣������͛_���������ɿ����o��S�ޣ������L���r(ji��)�������mr��������ݔ�������c�ň�������ͬ�������l�ʞ�ň����ε�2�������l�ʱ�����ͬ�r(sh��)����Y(ji��)��(g��u)�c늙C(j��)���ڽY(ji��)�ϣ������ں���늙C(j��)�Y(ji��)��(g��u)���pС늙C(j��)���w�e�����Ľ�Bmr�����������c(di��n)���Y(ji��)��(g��u)�����������ԭ����
2 mr�������ĽY(ji��)��(g��u)�ͻ���ԭ��
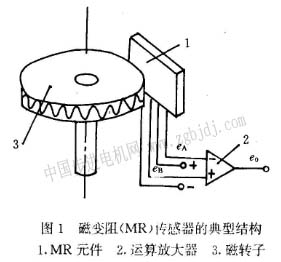
�D1��ʾmr�������ɴ��D(zhu��n)�Ӻ�mrԪ���ɂ�(g��)��Ҫ���ֽM�ɡ�
���D(zhu��n)���������Ų����Ƴɵı�ƽ�A�h(hu��n)�w���ڈA�h(hu��n)�w���������ns����(du��)�O���O��(du��)��(sh��)һ����120��(du��)���ϡ�
���ňA�h(hu��n)�w������ܴ�ע����Σ���������늹�䓰��Ƴɵ��D(zhu��n)�Ӽ��ϣ����η��㣬��r(ji��)������
2.2 mrԪ��
����(j��)ʹ�ò��|(zh��)�IJ�ͬ�֞�ɷN��ʽ��һ�N�����R���(lnsb)���黯�(gaas)�Ȱ댧(d��o)�w�����Ƴɣ��Q��댧(d��o)�wmrԪ������һ�N������F(nife)����(nico)ϵ�ȏ�(qi��ng)���Բ����Ƴɣ��Q�鏊(qi��ng)����mrԪ����ǰ�ߴ����ȵͣ����ߴ����ȸߣ���������nifeϵ��(qi��ng)����mrԪ���Ĵ�����****�����ڈ���(qi��ng)4ka/m������ʹ�ã���(y��ng)��****����
2.3����ԭ��
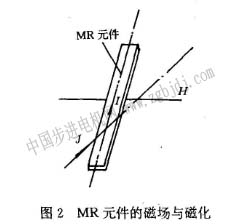
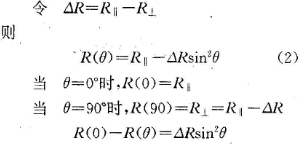
�D2��mrԪ���Ĵň��c�Ż�ʾ��D��mrԪ���Ĵŷ����������ň�h�´Ż�����(d��ng)mrԪ�������^���i�c�Ż��ķ���A�Ǟ��ޣ��tmrԪ�������ֵ����ʽ��ʾ��
�����@����(d��ng)ʹŻ������c�������ƽ�Еr(sh��)����=0�ȣ����****����(d��ng)ʹŻ������c�������ֱ�r(sh��)����=90�ȣ������С��
��
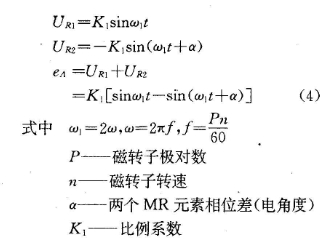
��ʽ(3)���������ÈD3����mrԪ�������׃�����S�ň�׃�����P(gu��n)ϵ������ԓ�����ǽ���һ�l���^δ�����B(t��i)�ֲ��������oՓ�ň����ӻ�p�٣������׃�����S�ň�׃����һ�µġ��D3��ʾ��nifeϵmrԪ�������׃�����S�ň�׃������������׃����****��ٷ�֮3��
2.4ݔ������
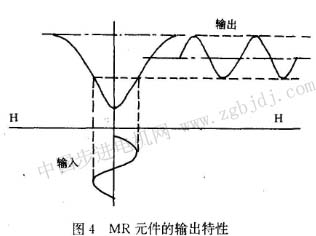
�D4��ʾ��mrԪ�����l�ʞ�ءޡ������Ҳ��ň������¶��õ���ݔ�����ԡ��ɈD��֪����ݔ��Ҳ�����Ҳ���̖(h��o)�������l�ʱ�������2�ء�
�������׃�����S�ň�׃���������R}���ԣ���˼�ʹ�����Ҳ�ݔ��ň������£���ݔ����(sh��)�H�ϲ������Ҳ��������иߴ��C����
2.5 mrԪ���ĵ�ֵ�·
ͨ��mrԪ���Ƀɂ�(g��)mrԪ�ط��Ӵ�(li��n)�M�������Ӿ�·����Ҋ�D5a��b�����@�N�Y(ji��)��(g��u)�Q��νM�����ӽӾ����@�r(sh��)�У�
|