����늄әC���Ƽ��g�о��İlչ���F��
���� ʯ ���X��ۣ��|�ϴ�W�Ͼ�210096��
ժ Ҫ �C��Ŀǰ����늄әC���Ƽ��g�I��İlչ��r�����ؽ�B����늄әC���Ʒ��������Ʋ��Է�����о��F��lչڅ�ݡ�
�� �~ ����늄әC���Ƽ��g�lչ�F��
1�� ��
����늄әC���Qusm��һ�N���É���մɵ��扺�Ч�����l����ӣ�ͨ�^Ħ������ӣ�������D�Q��Cе��ݔ��������ֱ����늙C��usm����****�������T����ٴ��D�ء������ܶȴo늴Ÿɔ_���ӑB푑��졢�\�Пo�������c���ڷ��B�m�\���I���ܿ����I��usmҪ����ͨ��늴�늙C��Խ�Ķࡣ�ڹ��I����ϵ�y����܇������������܃x���x�����k���Ԅӻ��O�䡢���ܙC���˵��I��usm�ЏV韵đ���ǰ����
1980�꣬�ձ���t��sashida�OӋ�����˵�һ�_�ܝM�㌍��Ҫ���usm늙C֮��usm�ͱ��ܿƼ�����I�����ҕ���������о��˳����ɞ鮔ǰ늚���I���һ���о����c��Ŀǰ���ձ���usm���о������ý��Kʡ����ƌW�����Y���Ŀ��bq96010�I��̎������****��λ���҇���90������_ʼ����usm���о����У��_չ��usm����Փ������о��c���l����ȡ���˿�ϲ�ijɹ����S�������IJ�ͬ�ĽY����usm���_�l�ͻ��A��Փ�о��������Լ�usm���̘I����Ŀǰ���ձ�usm���о����������usm�Ŀ��Ƽ��g�о��Ϳ����b�õ��_�l��
usm����һ�N���͵�С늙C���䱾���ļ��g�lչ���x���_��ӿ��ƺ��ӣ���늙C���w���y�_��늙C�����ܡ��r����ܡ����Ƽ��g�ĺÉģ��Pϵ���ܷ��ְl�]usm****���ܣ���ֱ��Ӱ�usm�đ��ú��ƏV������_չusm���Ʒ�����о��Ƿdz���Ҫ�ġ�
2 usm�Ĺ���ԭ�������ƙC��
usm�c���y��늙C��ͬ���o�@�M�ʹŘO���o��ͨ�^늴����îa���\��������һ��������w���ஔ�ڂ��y늙C�еĶ��ӣ��ɉ���մɺͽ��ُ��Բ����Ƴɣ����Ƅ��w���ஔ�ڂ��y늙C�е��D�ӣ���Ħ�����ϼ����ϵ��Ƴɣ��M�ɡ�������w�ĉ���մ������ϼӸ��l����늉��r�������扺�Ч��������sЧ���a����ʮǧ�յij�����ӣ����@�N���ͨ�^����w�c�Ƅ��w�g��Ħ����ϣ�׃�Q���Ƅ��w�����D��ֱ�����\�ӡ�
�����в���usm��ͨ�^��usm���Ӄ������Ԫ��ʩ�Ӿ���һ����λ��ĸ��l����늉������ڶ����м��lһ�в������ӱ����|�c���c�����M�����෴�ęE�A�\�ӣ����D�Ӊ��ڶ����ϣ��t���߃H�ڣ��в��������c���|����Ħ���������ã��D�������M���ķ������Ƅӡ������в��ӷ�ʽ���B�m�،��D��ʩ����������׃���ķ����ɸ�׃�D�����D����
ͨ�^��׃����usm���Ӄ���늉��ķ�ֵ���{��������λ����l�ʣ����Կ����в������c���ٶȣ��M���_������usm늙C�\�����Ե�Ŀ�ġ������в���usm����������нY��******����;****���̘I�������һ�N�����Ŀǰ��usm���Ƽ��g�Ϳ��������о�����ᘌ��в���usm���Եġ�
3 usm�Ŀ���׃��
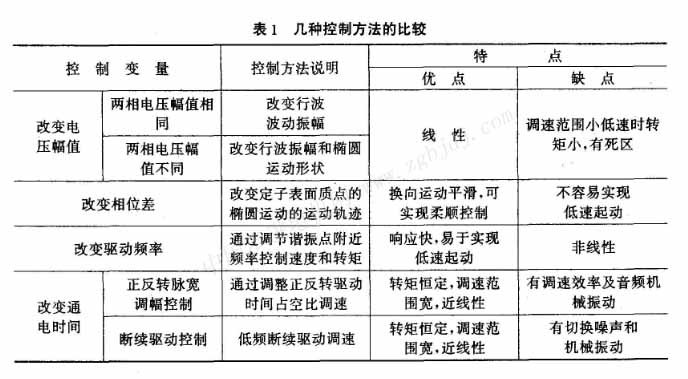
��usm���x�����������ԭ����֪����usm�д��ڃɂ������D���^�̣�һ�������ͨ�^���Ԫ�����扺�Ч���D���鳬��әCе�ܵęC�����^�̣�������������ӵęCе��ͨ�^Ħ������D�����D�ӵ����D�\�ӵęCе�ܵ��\������^�̡�����usm�Ŀ��ƣ����������xȡҪ���]���������c�@�ɂ������D���^�����P��������ͨ�^��׃�C�����^�̼����D������õ��\������^�̿���늙C������ָ�ˡ���ֱ���ӵ��ŷ�����ϵ�y�г���Ҫ��usm��λ�á��ٶȺ������M�п��ƣ��@��ͨ�^��׃���ӭh����Ӹ�׃���ӱ����|�c�ęE�A�\��܉�E�Π�ʹ�С�M�п��ƣ�Ҋ��1����
����늄әC���ٶȿ��ƿɲ��ø�׃늉����l�ʡ���λ��F��Ҳ����ͨ�^��׃ͨ늕r�g�����l�{��ռ�ձȣ����F�{�١�����늄әC��λ�ÿ��ƿ�ͨ�^λ�Â������M�з������ƣ��D�ش�С������λ����ƌ��F��늙C�D��ĸ�׃��ͨ�^��׃�����Դ��λ���F�����Č��F��usm�ĎN���Ʒ����������M���˷������^���Y�����1��ʾ��
�ɱ�1��Ҋ��׃�l�������m���ڳ���늄әC�Ŀ��ƣ���һ����ɳ�����ó���늄әC�ĵ��ٴ��D�ء��ӑB����푑����o���ȃ��c��ͬ�r�ܱ����^�ߵĹ���Ч�ʡ���λ����Ƽ��g�ɟo�ГQ�،��F�D���ƽ����׃��ͨ�^������λ����� |