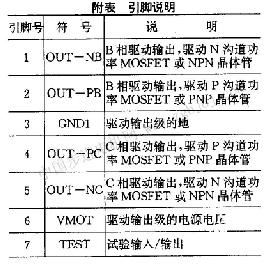
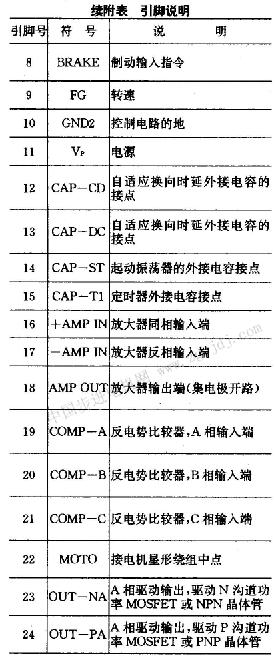
�\�ӿ��ƌ��ü����·������
�T���� (�V������ƌW�о���)
��ժ Ҫ�����Ğ顰�\�ӿ��ƌ��ü����·������(�m7)��(Ҋ1994�꡶늙C����1��)���mƪ����B�oˢֱ��늄әC�á�tda5142t�o�D��λ�Â����������c������ԭ���������ݵ��x���䌦늙C�Ŀ��ơ�
���� �~�������·�oˢֱ��늄әCλ�Â�����ԭ��늙C����
8 tda5142t�o�D��λ�Â������ğoˢֱ��늄әC����
tda5140��5141��5142�oˢֱ��늄әC���ü����·��philips���a���p�O�ͼ����·���m��������ȫ���ӷ�ʽ�ğoˢֱ��늄әC�������ز��û���Ч�������Ч�����D��λ�Â����������Ǒ������ඨ���@�M�ڲ�����r�g�ȵķ�늄��^���c�����D��λ�Ùz�y����ɓQ���^�̡�����tda5140a��5140at����600ma��������ֱ����늙C�@�M��tda5141����������1��5a����ֱ����Ӳ�űP���L�ȵȡ���tda5142t���t����ӹ���mosfet�����p�O�;��w�ܣ�����������_150ma���m�ڲ�ͬ����ˮƽ�ğoˢֱ��늄әC����ʹ�á����˫@��ÿ���@�M��늄���̖����횏�늙C���������������@�M�����c���@�Ǒ����@Щ�·��늙C���ӵ�Ҫ��
8��1���c
������늙C���@�M��늄��ṩ�Q����̖�����،��T�O���D��λ�Â�������
�����O�������·��
�������Q���c늙C��̖��ؓ�d��С�o�P��
����������ȫ���Q������ʽ��
��늙C�������νӷ����������c������
����ݔ��������ƺ��^�ᱣ�o��
������늙C��늄���̖�a�����_�Ĝy���l����̖(fg)��
�����Ƅӹ��ܡ�
�����O�Ъ����ĸ�ݔ������\��Ŵ��������������ƷŴ������������_�P�����Դ(smps)�ӵ��ƽ�D�Q�á�
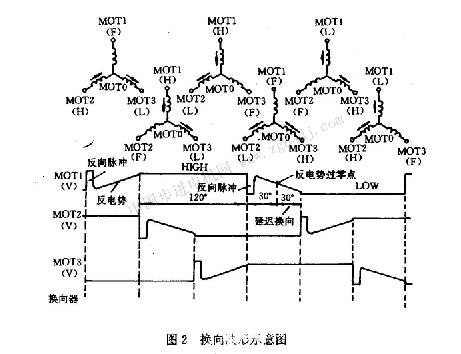
8��2���_�f�������Ɣ������_�f���總����ʾ��
��Ҫ���Ɣ�����
���늉�vp��4��18v
vmot늉�vvmot��3��18v comp��a��b��c��moto늉�������һo��5��vmor otu��n��otu��pݔ��������ƣ�<150ma
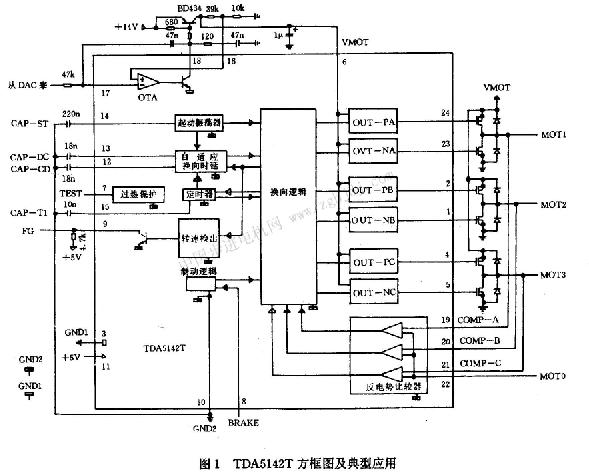
8.3�����Y���c����ԭ��
tda5142t�Ļ���ԭ���Y��Ҋ�D1���D����Ҫ�M�ɰ����Q��߉����ݔ��������늄ݱ��^���������Ŵ�����߀��������ʎ�������m���Q��r���·�����r��������������������������������һ���D��ݔ������һ���ᱣ�o�·��
�ڈD2��ʾ�ēQ�����ڃȣ�ȫ�������oˢֱ��늄әC�����@�M�������ʼ�ݔ����motl��mot2��mot3��ÿ��ݔ�������N���ܵĠ�B����늉��B���@�M�ӵ��Դ���ˣ��õ�Դ�������늉��B���@�M�ӵ��Դ�Ͷˣ��õ�©���������B������һ���@�M������B���F�ڸߑB�͵͑B֮�g���˕r�@�M̎�ڲ������B���@�M��늄ݼ������·�еķ�늄ݱ��^���z�y�����ɓQ��߉�x����һ�����ڃȣ������@�M�б��Ѓɂ��@�M�քe̎�ڸߑB��͑B��ֻ��һ���@�M̎�ڸ���B�����ķ�늄��^���c�������D��λ����̖���z�y�� Ҫע����ǣ���늄��^���c�c��һ������Q��r�����30�����@���r�g�g϶�����cap��cd��cap��dc��ݜy���ʹ��A�������ķ���ɓQ��߉�ɘӣ��Դ_���趨�ēQ��r�ӡ��ɓQ��߉�xͨ��늄ݱ��^���_����һ��늙C�@�M��늄ݵ��^���c���x�ã����Á�Ӌ�����һ���Q���c�����_�r�̣������m���Q��r���·��늙Cؓ�d�Ĵ�СӋ������_�ēQ��r�ӡ�
��ݔ�����������·���^�ᱣ�o�·���o��
��늄��^���c�౻�Á��ṩ늙C�ٶ���Ϣ���������D�ٵ��l����̖fg��
����ϵ�y����ֻ����늙C���D������a����늄ݲ��܌��F������ʹ늙C�����_���ӣ�оƬ���O����������ʎ�����a�����ӕr�ēQ���}�_��̖��
���r���Ĺ����������Ȳ����r��늙C���D�z�y�Ķ��r��
8��4�����ݵ��x��
8��4��1 cap��st�������
������ݛQ����������ʎ������ʎ�l�ʡ�����2��a��� |