С����Փ���ڽ����ŷ��M�oϵ�y���^�y����
���Ԃ� �����R �� ����ɽ�|���I��W����250061��
ժ Ҫ ӑՓ��С����Փ�����ڿ����I��Ŀ����ԣ�ͨ�^������ͬ��늙C�ӵİ��]�h�ŷ�ϵ�y�M�еķ����о��C��������ͬ��늙C늴��D�صĶ��A�����AС��׃�Q��ĩ���ٶȵ�׃����늴��D�ر����������У�����늴��D�صĶ��A�����AС��׃�Q�O��ģֵ�ķ��Ⱥͳ��ȣ������R�e���ٶ�׃������ʼ�r�g���Kֹ�r�g��׃�����ȡ�
���~ С��׃�Q�^�y�����ŷ�ϵ�y
1�� ��
���y�ĸ����~׃�Q����ͬ�r����̖�M�Еr����l��ȵľֲ����������Ӵ������~׃�Q���ڴ�����һ���x������r�l���t�S֮�_�����H�m����׃�������ҵĝu׃��̖��С��׃�Q�˷����������܌���̖�M�оֲ��������@һȱ�c��ͬ�r�к���������ȡ���ܣ����䌦ͻ׃��̖��̎�������F�����@�ă��c���x��r��֧���^�̵�С�����������ó���Ŀ����㷨�����Ԍ���̖�M�Ќ��r̎�����Ķ����ԑ����ڿ����I��
�ڔ��ؙC���M�oϵ�y�İ��]�h�����У���鷴����Ϣ����ȡ����ϵ�yĩ�ˣ��C�������_����ĩ�˵ĸ��N�ɔ_�ɞ�Ӱ푰��]�hϵ�y���ƾ��ȵ���Ҫԭ��������С��׃�Q�����е��殐��̖������ȡ���ܣ���ͬ��늙C�ӵİ��]�h�ŷ�ϵ�y���ٶȰl�����ӵ�ͬ��늙C늴����ر�����С�����������о����C������ͨ�^ͬ��늙C늴����صĶ��A�����AС��׃�Q�^�y�C�������_���ٶ�׃���������ϵ�y�ṩ�^��ʴ_�Ġ�B��Ϣ��
2С��׃�Q[3]
�O���ǻ���С�������B�mС�������壬�t��̖�S���B�mС��׃�Q
���˱��CС��׃�Q�Č����Ժͷ�׃�Q�Ĵ��ڣ�һ���x��С���������M�����S�l������Ҏ�ԗl�������]�������еČ��r�\�㣬����ȡ�߶����Ӻ�ƽ�����Ӿ����xɢֵ��
С��׃�Q��һ�N���µĕr�l�������ߣ������к����殐��̖������ȡ���ܡ��ڔ��W�ϣ�ͻ׃�c�����|��������ָ�������ġ������殐�cz������������ָ��С������������c������ָ��������xo̎��С��׃�Qϵ��ģֵ˥�p���������Ķ���ԓ����ȵ��c�Ք���xo�r�ɞ�ģ�O��ֵ��
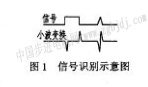
���xɢ2�MС��׃�Q��,log2 lw|��log2k +aj���@�f��������̖��z̎������������ָ�����t�S���߶ȵ����ӘO��ģ�Č���Ҳ׃������̖����ؓ������ָ������r�����෴�����⣬�����S�C��̖������������С��׃�Q�O��ģֵ��ƽ�����Ⱥ�ƽ�����Ⱦ������ڳ߶�j����˿���ͨ�^С��׃�Q����̖�ĘO��ģֵ�ķֲ�����R�eԭʼ��̖�е��殐�ɷ֡�С��׃�Q���|������һ�N�r��ȵ�׃�Q����������H�܉��R�e���殐��̖�������܉�ʴ_�ض�λԓ�殐��̖����D1��ʾ��
�@�N����ʹ�҂��܉��^�ʴ_���R�e������ϵ�y�е�ͻ�l�¼������r���{�����Ʋ������_��****�Ŀ���Ч����
����С�������ĕr��֧�������L������С��׃�Q��һ�N�̕r׃�Q������С��׃�Q���г���Ŀ����㷨����mallat��ʽ�㷨��Ӌ�����H��0(nlogn)�����Т���ԭʼ��̖�ķ���ӱ�ֵ���@�ɂ����c��С��׃�Q���ԑ����ڌ��r�����I��ı�Ҫ�l����
3 �C��ŷ�ϵ�yģ��
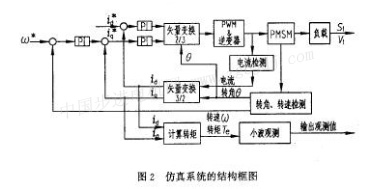
����ͬ��늙C�Ӕ��ؙC�������_�M�oϵ�y����ģ�Ϳ�D��D2��ʾ��ϵ�y���û���ʸ��������Փ���D�١�����p�hpi���ơ�
늴��D���nj����،���Ġ�B׃��������еĎׂ�������֮һ�����C�������_���ܵ����τ����ö��l���M�o�ٶȲ��ӕr����ֱ�ӌ���ͬ��늙C늴��D�ص�׃�������ͨ�^�^��늴��D�ؿ����^�y�������_�ٶȵ�׃��������늴��D�س���̎�ڏ����h��֮�У��^��늴��D�ر����y���^���ҕr��λ����ʴ_�������܉�ʴ_���R�e�殐 |