����ģ���������ŷ�ϵ�y���{�����g
���~�� ������ �����A �ؑ�(�A��������W��h430074)
��ժ Ҫ���ŷ�ϵ�yģ�����{����������ģʽ���ģ�����������������R�ȼ��g�Y������������ؓ�d�D�ӑT����׃���Լ��Cе��ӵȣ����^10��ε��{�������Ԍ��ŷ�ϵ�y�ٶȿ������������Ԅ��{�������^�M�⡣����C����ԓ���g��������Ч�ġ�
1�� ��
������Ӽ��g����Ӽ��g�İlչ�����M���ŷ�ϵ�y�ڹ��I�еđ��á�Ȼ���ڌ��H�����^���У��������Cе���r�l��׃���rҪ�����{�������������@һ���}������ʹϵ�y�܉�͙Cеؓ�d���^�õ���ϣ�����Ҫ�˞���M���{�����@Ҫ����Ќ��T��֪�R����ˣ��đ��õĽǶȳ��l�����F�ŷ�ϵ�y�ą����Ԅ��{�������nj��H���õ�������Ҫ��Ҳ���ŷ�ϵ�y�����ܻ��lչ��څ�ݡ�
Ŀǰ�Ԅ��{�����g��Ҫ�֞���һ�ǻ���ģ�͵��{�����g�����ǻ���֪�R���{�����g������ģ�͵����{�����g��Ҫ�������Ĝyԇ��̖��Ȼ�����ϵ�y��ģ�ͽY�����R�l��׃���ą������@�N��������̖�ľ�����һ����Ҫ����������Ӌ����Ҳ�^��һ��Ҫ�����\���ٶ��^���̎����������֪�R�����{�����g���Ǹ����A�ȴ_���õČ��H���Ҏ�t�͌��r��ȡ��ϵ�y�������_���������ą������@�N��������Ҫ�������Ĝyԇ��̖����ֻ��ϵ�yݔ��ݔ����̖����ˌ���̖��Ҫ�ߣ�����Ҏ�t֪�RҪ����^�ߣ�ͨ����Ҫ�����ľ��_�Č��H�{��Ҏ�t֪�R����ˌ��{�����Ŀ��Ŷ���Ҫ������C��
���ďČ��H���õĽǶȳ��l�������һ�N���ο��еą���ģ�����{��������ԓ���g����Ӌ����С�������F�����c������׃����ؓ�d�����^10����{�����Ԍ��������������{�������^�M�⣬�^�õ������׃����r������һ���̎�������Ɍ��F�@һ���Ʒ��������Y���C��ԓ�����ǿ��еġ�
2ϵ�y�Y�����Ԅ��{��ԭ��
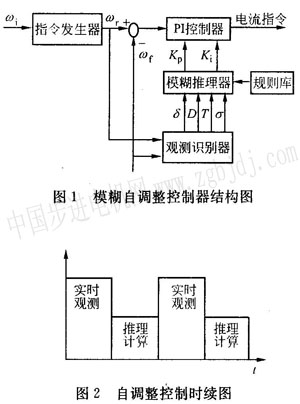
�D1ʾ����ģ�����{���������ĽY����D�����п������Ƀɲ��ֽM�ɣ������������{���C�������������֞��ٶ��{����������pi��ʽ��������ģ�����{�����������������ٶ�ָ��l�������^�y����ģ�����������ٶ�ָ��l�����Ǟ��˷�ֹ�ٶ�푑��a���^��ě_�����O�õ�ָ��_�C�����^�y��ͨ�^�ɘӌ��r��푑����Σ����г�ȡ����ֵ�糬�{�����������ӵȣ������@Щ׃���M��Ҏ��̎����ģ����̎�팢ݔ�뵽ģ��������������׃���D�Q�����Z�Է�̖��ʾ�ĺ��m���Z��ֵ������ģ��������������_��푑����Ե�ģʽ�������������A�õ�ģ��Ҏ�t���_���ŷ�ϵ�y���ٶȿ�����������{����Ϣ��ģ����������ݔ���Y����pi�������{�����ӣ�����{�����ӵ�ֵ����1���µĿ�����������Ҫ���ӣ����С��1���t�µĿ�����������Ҫ�pС��
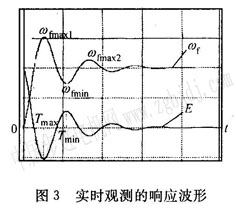
ģ���{�����Ƶĕr�m��D2��ʾ�����֞�ɂ��A�Σ����r�^�y�A�κ�����Ӌ���A�Ρ�
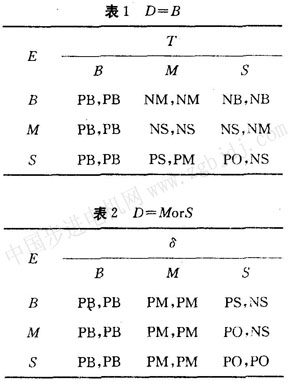
�D3ʾ���ˌ��r�^�y�A�����ɘӵ�푑����Σ�e�ǽo��ָ���r�ͷ�����f֮�g��ƫ���ģ�����{���������õ����������x���£�
tr���ٶ�ָ�������ٕr�g������max���ٶȷ����\�Еr��****����ֵ��
��ʽ�У����dz��{����d���������ӣ�t��Ҏ����ʎ���ڣ���������푑��Ŀ����������ٶȲ����ʣ�����ӳ��ϵ�y푑��ķ��B���ԡ����˜ʴ_���^�y������������������Ҫʹ�^�y���ڱȌ��H���ŷ�����푑�����Ҫ�L��
������Ӌ���A�Σ����IJɘ��^�y�Ĕ����г�ȡ������ֵݔ�뵽ģ������������Ҫ���@Щ׃���M��ģ�����������ڱ�ʾ����ģ��׃���`�ٶȺ�����ģ�����ϰ���s��m��b�������@�Ă�����׃�����`�ٶȺ�������һ�µġ�ģ����������ݔ���Y�����ٶ�pi�{������������ͷe�����������ֵ��cp�͡�ci���@�ɂ�׃��������ͬ���`�ٶȺ�����ͬ�ӵ��Z�Է�̖nb��nm��ns��zo��ps��pm��pb������ģ��Ҏ�t�_���ɂ�������һ��ģ���Q�߆��}���Q�߷�����Ҫ�����N��
1���߶ȷ���2����λֵ�ЛQ��3���ә�ƽ���ЛQ��
���˜p��Ӌ���������ø߶ȷ��_������������������ֵ���t�{������ٶȿ����������ɱ��_���£�
3ģ���������{��Ҏ�t
���˵õ��ʴ_���挍�ط�ӳ����ϵ�y�����ԵČ��r�^�y���Σ����M�����Cʹ�ŷ�� |