צ�Oʽ���Ų��M늄әC�o�D�ص�Ӌ��(1)
�� ��(�ؑc늙C�S400043)
1 �� ��
צ�O���Ų��M늄әC����������ӑՓ��������צ�O���Ų��M늄әC�������Ų��M늄әC��һ�N�Y����ʽ�����Y�����Σ����ƹ���С��늴�������ж�λ�D�أ�ͨ���O���ֶ࣬�ɱ�һ�����Ų��M늄әC�IJ����С����������l�ʺ��\���l��Ҳ�^�ߣ����ϸ��N�����b����p���X݆�^���y�ȿ�ֱ�������t�D�P�����{�����L�塢��ӡ�^��늄ӱõȡ�
2�Y���������c
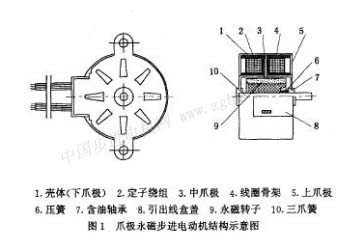
צ�O���Ų��M늄әC�ĵ��ͽY����D1����ʾ��צ�O���Ų��M늄әC��2�����Ӻ������D�ӽM�ɡ�ÿ�������Ɏ�צ�O���ϡ��к��С����F�ļ�������צ�O�ϵ��@�M���M�ɣ�2�������ڿ��g��e�_90��늽Ƕȡ��F(xi��n)������Ҫ�������ܶ�Ҫ��B���¡�
2.1צ�O����
צ�O�������w�F(xi��n)צ�O���Ų��M늄әC�Y����������Ҫ�����������ɱ��Κ��w�����º��Q��צ�O������צ�O����צ�O�M�ɡ��ϡ��С���צ�O���÷��P��a��܈��䓰�_����������ڸ��N늄әC���Ы@���˘O��V���ؑ��á��_���r�_�������ڈA�ܾ�����ݗ���צ�O������90�ȣ��M��һ��צ�O�����ĈA���w���ӡ�צ�O���Π�������צ�O��������߅����������������צ�O���ϡ��С���צ�O�Ͼ��_�ж�λ��ӛ��2����צ�O�Ӷ�λ��ӛ��ۺϣ����C��eλ90��늽Ƕȣ��γ�2�����ӵ���צ�O���ٰ���λ��ӛ������צ�O�������䰴��λ��ӛһ��������צ�O���@���γ���2����eλ90��늽Ƕȵ�צ�O���ӣ��γ�צ�O���Ų��M늄әC�Ķ�������·��
2.2�����@�M
צ�O���Ų��M늄әC�Ķ����@�M��ͬ��һ�����Ų��M늄әC�Ķ����@�M�����Ƿքe��2����Ȧ�Ǽ��ϲ��@2����(li��n)�ĭh(hu��n)�ξ�Ȧ���M�������@�M������������늙C�Юa���S���ͨ���Ա��ڶ���צ�O�Ϯa��n��s���g�ŘO��
2.3�����D��
צ�O���Ų��M늄әC���D�����ɸ߳C�B���ĺ���F���w���S�F��ŭh(hu��n)�c���Sһ��ע�ܶ��������D�ӡ�
�D�Ӵŭh(hu��n)�A�ܾ���س��ж���n��s�g�ĴŘO����O���c����צ�O����ȣ��ɸ�������Ҫ���ͬ���D�ٛQ����
2.4���c
צ�O���Ų��M늄әC�е�צ�O���ӵă�(y��u)�c�ǣ�
������צ�O�_�����죬����ӹ����㡣
������צ�O�OӋ�m���ڶ��O�Y�������H�pС�����Ų��M늄әC�IJ���ǣ����Ҳ��������ʸߡ�
������צ�O�X�������D�ӘO������z��=2p�����X�C�����؞�2���C�����أ���2��������eλ90��늽Ƕȣ�����2�����ӵ��X�C�����ط�ֵ��ȣ���λ�෴���ϳɞ��㡣
ȱ�c�ǣ�
��צ�O�g©�Ŵ����˚�϶��ͨ����Ч�����ʡ�
������צ�O�F���еĜu�����������F�ĴŌ�afe��׃����Ҳ��ʹ늙C��늸��S�l�ʶ�׃�������Ӱ�늙C�ĄӑB(t��i)���ܡ�
3 ����ԭ��
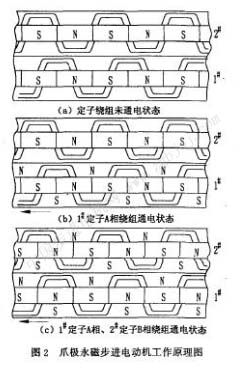
�������@�Mͨ늕r������늙C�Юa���S���ͨ����צ�Oͨ�^��϶�c�����D����朣������D�Ӵň�����îa���D�أ����D�����D�����˷��㣬��늙C���S���и�չ�_���了��ʾ��D��D2��ʾ��
�ĈD2չ�_�D��Ҋ���ٶ�צ�O�����ΘO���ڶ����@�Mδͨ늕r�������D�ӵĴŘO������צ�O����������ڴŘO�����cצ�O���ĺ�צ�O�g���Č��ʕr����ȵģ���ˣ������D���ڴ�λ��̎���oƽ���B(t��i)��Ҋ�D2a����
3.1ͨ늷�ʽ
ͨ늷�ʽ��ָ�����@�M����ͨ늵����צ�O���Ų��M늄әC��2�����ӣ��O��һ�����Ӄɷ����@�M�քe��a��a1���ࣻ�O�ڶ������Ӄɷ����@�M�քe��b��b1����(��Ҋ�D3)��
|