���M���ŷ�ϵ�yݔ����̖���OӋ
���|�� �K����������ͨ��W710049��
ժ Ҫ �ڻ��ڲ��M���ŷ�ϵ�yݔ����̖�Č��H���Y�ς��y�ŷ�ϵ�yݔ����ʽ�����������M�ϵķ��������һ�N�ȱ���Ӌ��C���F���ֿ��`���{����ݔ����̖�OӋ���������o�����P���C����
�� �~ �ŷ�ϵ�yݔ����̖�����M��
1 �� ��
�������ϵ�y���\��Ч�ʣ����ŷ�늙C����ؓ�d��ijһ�c�\�е���һ�c����λ�ƿ��Ʒ�ʽ�\�Еr���鱣�C�\�Ӳ�����ƽ���͜ʴ_��λ�������ӡ�ֹͣ�r��Ҫ�M�мӜp�ٿ��ƣ����ҳ�ʹ�г̕r�g��̵Ŀ���Ҏ�ɣ��༴****���������lҎ��[1]��
�ŷ�늙C���\�����ܲ��H��ه��늙C�����ą����������c늙C���Ӳ��֡�����ؓ�d�Լ������}�_�������P�����ڲ��M���ŷ�ϵ�y�����O��l���̶�����r�£��s���г̕r�g����Ҫȡ�Q�ڿ����}�_��ݔ�뷽ʽ��
2 �ŷ�ϵ�y�ļӜp�ٿ���
�Ӝp�ٿ��Ƶľ��w�����кܶ࣬�����^���õķ�����Ҫ�ЃɷN��ָ��Ҏ�ɼӜp���㷨��ֱ��Ҏ�ɼӜp���㷨���@���ȼ��Oÿ��һ���̶��ļӜp������t��Ӌ��һ���M�o�l��f���á�si��ʾ��ԓ���ٜp�����ڃȺϳ��ٶȷ����ϵ��M�o������fe��ʾ�����r���M�o�l�ʣ��á�si��ʾ������ÿ���Ӝp���ڃȵ��M�o��.
2.1ָ��Ҏ�ɼӜp���㷨
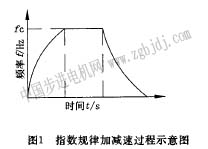
ָ��Ҏ�ɼӜp�ٿ��ƌ����Ӻ�ֹͣ�r���ٶ�ͻ׃׃���S�r�g��ָ��Ҏ�ɼ��ٻ�p�٣���D1��ʾ��
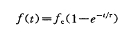
ָ��������һ���Pϵ�ǣ�
���ӕr�У�
�M�o�ٶ�׃��Ҏ�ɞ飺
���ٕr�У�
ָ���Ӝp�ٿ������^���ĸ�ۙ�����������ٶ�׃���^��r��ƽ�����^�ָ���Ӝp��һ���m���ڸ�ۙ푑�Ҫ���^�ߵĈ����С�
2.2ֱ��Ҏ�ɼӜp���㷨
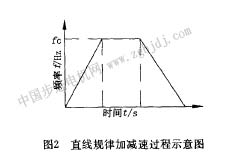
ֱ��Ҏ�ɼӜp�ٿ��������Ӻ�ֹͣ�r����һ���ļ��ٶȄ���١���p�٣���D2��ʾ��
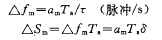
��ʾ��һ���Ӝp�����ڃ��M�o�l��׃�������á�sm��ʾһ���Ӝp�����ڃȵ��}�_���������c�O���ļ��ٶ����P���ٶ����ٶȞ�am (m/sz)���}�_������8(m)�����ٶ����ڞ�t(s)��
ֱ���Ӝp��ƽ�������^�ã��m�����ٶ�׃�������^��Ŀ��ٶ�λ��ʽ�С�
3���εIJ��M���ŷ�ϵ�yݔ����̖�OӋ
���M�в��M���ŷ�ϵ�y���о��r���������ϵ�y���ܵ��{ԇ��Ҫ����ݔ����̖�l���������Ҫ��飺
(1)���a������̖��һ�l�ʷ����}�_����̖���M�㔵���ŷ�ϵ�yݔ����Ҫ��
(2)��̖���l�ʿ��Ը����O����׃�������������l�^�̣��Ա��Cϵ�yƽ���\�С�
(3)��̖ݔ���׃���ʞ���{���ģ����m��ϵ�y�\�еČ��H��Ҫ��
(4)��̖ݔ���}�_������ϵ�yλ������****�l�ʌ���ϵ�y��****�ٶȡ�
(5)�ܮa��һЩ�����Ŀ�����̖�������D�����ГQ��ͨ��������ГQ�ȡ�
���@����IJ�����һ�N�^�麆��ķ����팍�F�@ЩĿ�ˡ�ᘌ��ŷ�늙C�����c���ڼ����^���в��������������M�Ϸ������������Ñ��O���Ĺ��c�l�ʡ�****�l�ʺ���ʼ�l�ʣ���ܛ���������ΰ�ָ��Ҏ�� |