���Ž����ŷ����g(sh��)�����M(j��n)չ���m(x��)3��
�T���ɣ�������늙C(j��)�о���
��ժ Ҫ�����Ğ顰���Ž����ŷ����g(sh��)�����M(j��n)չ����Ҋ1990�꡶늙C(j��)����4�ڣ����m(x��)ƪ����B�ŷ��(q��)��(d��ng)���ĽM�ɺ���ԭ���������ŷ��(q��)��(d��ng)���cֱ���ŷ��(q��)��(d��ng)������Ҫ��e����ֱ���ŷ�늄�(d��ng)�C(j��)��ͬ���ͽ����ŷ�늄�(d��ng)�C(j��)�ͮ��������ŷ�늄�(d��ng)�C(j��)���늙C(j��)�������c(di��n)�ı��^��
�����}�~���ŷ��Ŵ���������ԭ��������늄�(d��ng)�C(j��)���ŷ�늄�(d��ng)�C(j��)��ͬ��늙C(j��)������늙C(j��)��ֱ��늙C(j��)������
5�ŷ��(q��)��(d��ng)���Ļ����Y(ji��)��(g��u)����ԭ��
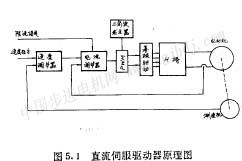
���͵Ľ����ŷ��(q��)��(d��ng)���ͽ�(j��ng)���ֱ���ŷ��(q��)��(d��ng)�����ƣ�Ҳ�ǰ�������h(hu��n)���ٶȭh(hu��n)���]�h(hu��n)����ϵ�y(t��ng)����ˣ������ŷ��(q��)��(d��ng)��Ҳ�Q���ٶȿ��Ɔ�Ԫ����Q���ŷ��Ŵ����ȡ��D5.1��5.3��5.5�քe��ֱ���ŷ������Ҳ��(q��)��(d��ng)�;��β��(q��)��(d��ng)�Ľ����ŷ��(q��)��(d��ng)����ԭ������D���ĈD�п�Ҋ���ɷN�����ŷ��(q��)��(d��ng)����ֱ���ŷ��(q��)��(d��ng)���Ļ����Y(ji��)��(g��u)�����Ƶġ������Ă������Ы@���ٶ���Ϣ����(j��ng)һ�����·׃�Q�γ��ٶȷ���늉������c�o��ָ���ٶ�늉���̖(h��o)���^�����`����̖(h��o)���ٶ��{(di��o)��(ji��)���M(j��n)�зŴ��У����ͨ����pl�{(di��o)��(ji��)�����o������������أ���ָ����̖(h��o)��������h(hu��n)��ݔ��ָ�������h(hu��n)�У�������������õ������������̖(h��o)�cָ����̖(h��o)�M(j��n)�б��^���`�(j��ng)����{(di��o)��(ji��)���Ŵ�У�����ͽo�}���{(di��o)�Ɔ�Ԫ���Ҋ��ppvm�������Dz��l(f��)������늉����^����(g��u)�ɡ����{(di��o)�Ƶ��}����̖(h��o)���ƻ��O�(q��)��(d��ng)�·�������(q��)��(d��ng)��׃��(sh��)�F(xi��n)��(du��)늙C(j��)�@�M��������ơ��@���Ҋ���������pwm��
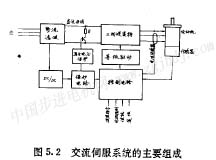
 �ɈD5.2�ŷ��(q��)��(d��ng)��߀�������ׂ�(g��)���ֽM�ɡ����ȣ��(q��)��(d��ng)���ĸ�늉�������ֱ��ĸ����(l��i)�Դ���ֱ���Դ��ͨ���������ཻ��늉�ݔ�룬��(j��ng)��ʽ�����V����@�á�ϵ�y(t��ng)�Еr(sh��)Ҳ���Æ���ݔ�롣��(d��ng)ϵ�y(t��ng)�Ƅ�(d��ng)�r(sh��)��늙C(j��)��(d��ng)�ܵĻ������ڞV��������ϳ��ʹֱ��ĸ��늉�Ѹ��������Σ����׃��Ĵ����_�P(gu��n)�ܺ͞V�����������������늉����o(h��)���������m�r(sh��)��ͨһ������_�P(gu��n)�������늺ɽ�(j��ng)늽Mr�̕r(sh��)ጷ�һ���֣�ʹֱ��ĸ��늉��֏�(f��)������ֵ�����������ϵ�y(t��ng)�\(y��n)�пɿ��ԣ�ᘌ�(du��)�ɽ���F(xi��n)�ĸ��N������r���ϣ��O(sh��)���˱��o(h��)�͈�(b��o)���·�����猦(du��)�^(gu��)늉���Ƿ늉����^(gu��)������^(gu��)�d���^(gu��)�١��^(gu��)��ȵı��o(h��)������߀�ж̕r(sh��)�^(gu��)�����Ƶȸ����·��
�����ŷ��(q��)��(d��ng)���cֱ���ŷ��(q��)��(d��ng)���ڽY(ji��)��(g��u)�ϵ���Ҫ��e������������h(hu��n)��
5��1 ���Ҳ��ŷ��(q��)��(d��ng)��������h(hu��n)
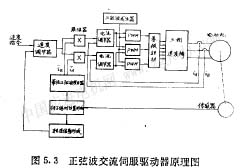
�����(q��)��(d��ng)��ʽ�Ľ����ŷ��(q��)��(d��ng)��ԭ��Dʾ�ڈD5.3�С��@�����h(hu��n)��������Ҫ�ǿ���늄�(d��ng)�C(j��)�����@�M����M������Ҫ��
a����(y��n)���������(du��)�Q���Һ���(sh��)׃���P(gu��n)ϵ��
b����������λ�քe�cԓ��ķ�늄�(sh��)��λͬ�ࣨ���ࣩ��
c���������ֵ�c�ٶ��{(di��o)��(ji��)��ݔ�������ָ����̖(h��o)����������
���ø߷ֱ��ʵ��D(zhu��n)��λ�Â������a(ch��n)�����D(zhu��n)��****λ����Ϣ���چ�λ�����������Юa(ch��n)�����������Ҳ���̖(h��o)�������ķ�ֵ��һ��λ������λ�c�D(zhu��n)���D(zhu��n)��0���P(gu��n)��  ��λ���Ҳ���̖(h��o)�İl(f��)�������S�ͬ����������������һ��(g��)���ӣ��D(zhu��n)��****λ����̖(h��o)��һ��(sh��)������̖(h��o)�����M(j��n)�ƴa�����ڃɂ�(g��)���Һ���ֻ�x�惦(ch��)��(rom)�зքe�x��������λ���Ҳ��Ĕ�(sh��)��������(j��ng)�ɂ�(g��)dl4�D(zhu��n)�Q����ɵ�ģ�M��ݔ����������λ���Ҳ���̖(h��o)�ڃɂ�(g��)�˷������c���ָ����̖(h��o)�M(j��n)�г˷��\(y��n)�㣬�õ��������ָ����̖(h��o)����(sh��)�H�ϣ����Î��˷����ܵ�dl4�D(zhu��n)�Q������rom��ݔ����ֱ���@���硯���硯��̖(h��o)���@�ɂ�(g��)��̖(h��o)�քe�ڃɂ�(g��)��ͬ������{(di��o)��(ji��)�����c�������������̖(h��o)�M(j��n)�б��^����(j��ng)�����ppvm�h(hu��n)��(ji��)������׃�����@�����늙C(j��)�����@�M���֮�͞����ԭ�������Եõ�������pwm��̖(h��o)��
5.2���β��ŷ��(q��)��(d��ng)��������h(hu��n)
���β��(q��)��(d��ng)�Ľ����ŷ��(q��)��(d��ng)��ԭ��Dʾ�ڈD5.4����D��ʾ�����D(zhu��n)��λ�Â�������̖(h��o)̎���õ��D(zhu��n)��ÿ�D(zhu��n)3604늽Ƕȵ����� |