�̿ز��M(j��n)늄�(d��ng)�C(j��)�(q��)��(d��ng)�b������
��С�磨�Ϻ�늙C(j��)���g(sh��)�о�����
���M(j��n)늄�(d��ng)�C(j��)��һ�N����}�_��̖(h��o)�D(zhu��n)�Q������(y��ng)��λ�ƵĔ�(sh��)�ֈ�(zh��)��Ԫ�������о��ȸߡ��T��С���ɿ��ԏ�(qi��ng)�����c(di��n)���c������͵�늄�(d��ng)�C(j��)���^�����m�˲���̎�������ơ�����ڔ�(sh��)�ֿ����I(l��ng)���电(sh��)�ؙC(j��)�����C(j��)е�֡��L�D�x�����_(d��)�����ڰl(f��)���_(t��i)�Ȍ�(du��)�D(zhu��n)��׃��������׃������λ��Ҫ��Ĉ�(ch��ng)�ϫ@�ÏV����(y��ng)�á�
���ĸ���(j��)�������Ƴɹ������a(ch��n)�Pʽ늙C(j��)�����O(sh��)�䡪���P��ʽ늙C(j��)�����D(zhu��n)�ӛ_��������(y��ng)�õIJ��M(j��n)�a(b��)���b�õ����ƣ���(du��)����z1p -80�ΰ�C(j��)��(sh��)�F(xi��n)���M(j��n)늄�(d��ng)�C(j��)�Ŀ�����һ��B��
l �P��ʽ늙C(j��)���D(zhu��n)�ӛ_���IJ��M(j��n)�a(b��)��
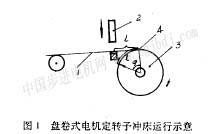
�P��ʽ늙C(j��)�����D(zhu��n)�ӛ_���\(y��n)���^�̻���ԭ����D1��ʾ���D��1��Ҏ(gu��)�Ĺ�䓎��ϣ�2��_�Ʋ��͵ě_�^��3��P�����Ķ��ӻ��D(zhu��n)��d��_�Ǝ��ϵ����c(di��n)���\(y��n)�з�����D�м��^��ʾ��
�_���^�̣���(d��ng)�_�^ÿ�_��һ�£������\(y��n)�����^l���x����(y��ng)���D(zhu��n)�S3�D(zhu��n)�^�ʽǶȣ��䌦(du��)��(y��ng)���L(zh��ng)z��(y��ng)�M���P(gu��n)ϵʽ
����ÿ�_��һ�����γɵIJ�����һ��(g��)��(bi��o)��(zh��n)�ĈA��������������ʽ�p�@�Ľ��ƈA����j�_����һ�A�܃�(n��i)�ķֲ������ܵȷ֣�����Ҫ��(du��)ÿ�_һ���M(j��n)���m���a(b��)�������⣬�S���p�@Ȧ��(sh��)���ӣ�����(y��ng)�İ돽rҲ���ӣ�ÿ�_��һ�������^�Ļ��L(zh��ng)���������M(j��n)���L(zh��ng)��������(y��ng)��׃������ʹ�����һ���ĺ���(sh��)Ҏ(gu��)�ɣ���������(y��ng)���a(b��)�����@��ͨ�^����ܛ��������M(j��n)늙C(j��)��ܛ��ָ����������L(zh��ng)�����׃���M(j��n)늙C(j��)���\(y��n)�з��Ķ�����(d��ng)�a(b��)����(zh��)�ЙC(j��)��(g��u)������a(b��)���^�̡�
2Ӳ����ܛ��
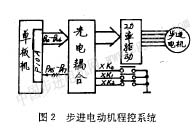
��ϵ�y(t��ng)����tp - 801�͆ΰ�C(j��)����Ӳ�����������ಽ�M(j��n)늄�(d��ng)�C(j��)���ΰ�C(j��)���пɾ��̹��ܣ���Ӳ���Ͽ�ʡȥ�h(hu��n)�η����·��ʹ�Y(ji��)��(g��u)���麆(ji��n)�㣬ϵ�y(t��ng)��D2��ʾ�����Æΰ�C(j��)�Ͽɾ��̲��нӿ�pl0����(j��ng)���ż���·���o�����(q��)��(d��ng)���l(f��)��һ��Ҏ(gu��)�ɵĭh(hu��n)�η����}�_�����Ʋ��M(j��n)늄�(d��ng)�C(j��)�����M(j��n)��
�քe���x������(d��ng)��̖(h��o)��ֹͣ��̖(h��o)���������D(zhu��n)��̖(h��o)�����г��_�P(gu��n)��ͨ�l(f��)�����ƽ��Ч����(d��ng)�ΰ�C(j��)���ܵ�pa:,���ƽ��̖(h��o)��푑�(y��ng)�Д࣮�D(zhu��n)���(zh��)���Д����(w��)�ӳ�������(d��ng)����
�ΰ�C(j��)���ż�Ϲ����(q��)��(d��ng)���M(j��n)늙C(j��)
���_ʼ��(zh��)������(d��ng)����r(sh��)�ΰ�C(j��)����Ҫ�Дಽ�M(j��n)늄�(d��ng)�C(j��)���D(zhu��n)���ɘ�i>a.�ڣ�Ȼ��Ӌ(j��)��õIJ�����(sh��)��l>c�Ĵ�����ԓ������(sh��)�Q��Ҫ�a(b��)�����Ĵ�С��
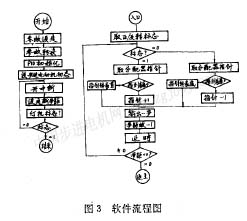
���M(j��n)늄�(d��ng)�C(j��)���}�_�����������ʮ�ķ�ʽ�������@�M��(d��o)늴���?y��n)飺aһabһb--bcһcһcdһdһdeһeһea������ֵ���總����ʾ��ܛ������ֵ�����гɱ����O(sh��)��׃ַ�Ĵ���ly�������ָᘣ��ܶ���(f��)ʼ���Ƅ�(d��ng)ָᘣ�������outָ��ݔ����(d��ng)ǰָᘃ�(n��i)�ݣ�ֱ��������(sh��)�p���㡤���M(j��n)늄�(d��ng)�C(j��)���D(zhu��n)��(d��ng)������(y��ng)�IJ��࣮ܛ�����̈D��D3��ʾ��
���M(j��n)늄�(d��ng)�C(j��)���\(y��n)���ٶ���ͨ�^ܛ����(sh��)�F(xi��n)�ģ����ӕr(sh��)�ӳ�������t�r(sh��)�g����(sh��)���Ϳɸ�׃늙C(j��)���\(y��n)���ٶȡ������D(zhu��n)��B(t��i)�ȿ�ͨ�^ܛ���O(sh��)����Ҳ�����ⲿ�г̟o�P(gu��n)��ͨ�c������ơ�ܛ����δ���żӡ��p���\(y��n)�г�������?y��n)�ÿ�_��һ�۵��a(b��)��������Ҫ�D(zhu��n)�^�ĽǶȲ���ľ��ʣ����б�Ҫ����ٻ�܇����������(y��ng)�È�(ch��ng)�ϣ��t����ܛ�������Ӽ��١��p���\(y��n)�г�����Ҫ���κ�Ӳ���ϵĸĄ�(d��ng)��
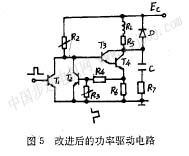
3�����(q��)��(d��ng)�·�ĸ��M(j��n)
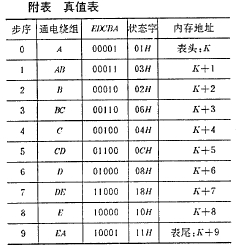
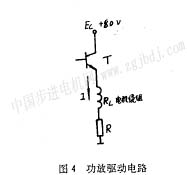
չ��(ji��n)�εĹ����(q��)��(d��ng)�·��D4��ʾ��
���M(j��n)늄�(d��ng)�C(j��)��90bf009����ÿ���o�B(t��i)�����7.4��늉���8017����Ȧ����0.2/180.����Ȧ늸О�4mh��
4�Y(ji��)�Z
���Æΰ�C(j��)���Ʋ��M(j��n)늄�(d��ng)�C(j��)���b�ã�����ʹ�����·�õ���(ji��n)�������ҿɸ���(j��)��(sh��)�H��Ҫ���IJ��M(j��n)늄�(d��ng)�C(j��) |