�u��ʽ��Ȧ늄әC늴Ņ�������Փ����
������ �S���(�C늲�)
��ժ Ҫ�������u��ʽ��Ȧ늄әC���\�Ӡ�B������ɂ���Ҫ��늴Ņ����M���ƌ����������س����ĸ���������u��ʽ��Ȧ늄әC�����س���������Ӌ��ʽ�����и��Б����e�����C����ʽ���Ѕ����rֵ��
���� �~����Ȧ늄әC��늴Ņ��������س�������裬Ӌ�㣬��ʽ
0�� ��
���ڴűP������������������ܶȻ�Ѹ�ٰlչ������ò��M늙C��ֱ��ʽ��Ȧ늙C�����䶨λ�C�����h�h���ܝM��Ҫ��Ŀǰ��������Ӳ�űP���������Óu��ʽ��Ȧ늙C���鶨λ���ЙC�����u��ʽ��Ȧ늙C���H���о��_��λ�����ԣ����Ҿ��п��ٴ�ȡ�����Ĺ��ܣ����Ǿ�����˃�Խ���ܵēu��ʽ��Ȧ늙C����Ҫ늴Ņ������OӋӋ��Ŀǰ�Пo����Ĺ�ʽ��һ�㶼��ه��ֱ��ʽ��Ȧ늙C�����������\�Ӡ�B���б��|�ą^�e���u��ʽ��Ȧ늙C������c (a< 90��)�Ƕȵ����D�\�ӣ�ֱ����Ȧ늙C����ֱ���\�ӡ��������ֱ��ʽ��Ȧ늙C�Ĺ�ʽ���OӋ�u��ʽ��Ȧ늙C�@Ȼ�Dz������ġ����ĸ����u��ʽ��Ȧ늙C���\�Ӡ�B���ƌ�����늴Ņ���Ӌ��ʽ��
1 �u��ʽ��Ȧ늙C�ɂ���Ҫ
늴Ņ������ƌ�
�u��ʽ��Ȧ늙C��늴Ņ���Ӌ�����늉�ƽ�ⷽ��ʽ���\�ӷ���ʽ�o����
늉�ƽ�ⷽ��ʽ
���Ȧ늸к�С�����Ժ���ʽ(1)�Єt�õ�
����ʽ(2)��������
�ٶ��u��ʽ��Ȧ늙C̎������ĺ�늉�������B�����ڼ��ٶ���(4)ʽ��e= eo= const��
�ڜp�ٶ��� e=-eo- const���t��
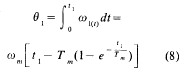
ʽ(5)��һ�A�����g���̣��x���ʼ�l�����ɽ�ü��ٶΓu��ʽ��Ȧ늙C�Ľ��ٶȱ��_ʽ��
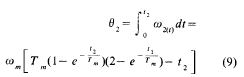
ͬ�ӣ��x��p�ٶεij�ʼ�l������ɽ���˕r�Ľ��ٶȱ��_ʽ
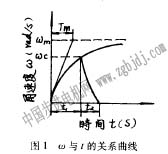
����(6)(7)��ʽ�������Dl��co�ct���Pϵ������
��ʽ(6)�ɵá�
���x����u��ʽ��Ȧ늙C�����س���)�ĈDl��֪���p�ٙCе�r�g����������ͽ��ٶȶ��ܿs��ƽ�������r�g�������������س���(blr)ֵ��һ����ɜp��е�r�g����t����ʹt�s�̣���һ���棬ͽ��ٶ�(om�Ĝp����ʹ�ö�������ˣ����س���( blr)��Ȼ������һ����Փ****ֵ��ʹ�ö�����С������****������Փ���ٶ���Ȧ�ĕr�gt�M�ж�λ���D�^�ĽǶȦȣ���ô���ȼ�һ�����O��늉�eo����f�r�g��****���٣��o������׃늉��O�ԣ���t2�r�g��****�p�٣�ʹ�u��ʽ��Ȧ늙C�������г̵ĽK�˽��ٶȞ��㡣����(6)(7)��ʽ�����e�ֿɵü��ٶΓu��ʽ��Ȧ늙C�D�^�ĽǶ�
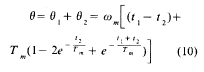
�p�ٶΓu��ʽ��Ȧ늙C�D�^�ĽǶ�ȫ�������г�
�� 20�ɵ�
|