��(y��ng)���C(j��)��(sh��)�F(xi��n)���M(j��n)늄әC(j��)���ٶȿ���
���ڰ�������C(j��)е�W(xu��)Ժ��
o�� ��
��(y��ng)���C(j��)���Ʋ��M(j��n)늄әC(j��)�ٶȵă�(y��u)�c(di��n)���`��㡢�ɿ��Ը��Լ���r�͡����ľͲ��M(j��n)늄әC(j��)��׃���^�̺�׃��ԭ������µĿ������Ա���õ��O(sh��)Ӌ(j��)���M(j��n)늄әC(j��)���ٶȿ��Ƴ���
1���M(j��n)늄әC(j��)�ٶȿ���ԭ��
���^���M(j��n)늄әC(j��)���ٶȿ��ƾ��ǿ��Ʋ��M(j��n)늄әC(j��)�a(ch��n)�������r�g��ʹ���M(j��n)늄әC(j��)���սo�����ٶ�Ҏ(gu��)���M(j��n)�й�����
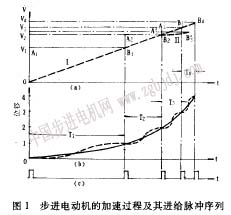
���ȿ��]���M(j��n)늄әC(j��)�Ą�����^�̡������M(j��n)늄әC(j��)�ڳ�ʼ�r��to=0���ٶȞ��㣬�F(xi��n)��Ҫ���M(j��n)늄әC(j��)������ٶȣ�a>0�����٣��Kֹ�ٶ���y�����M(j��n)늄әC(j��)���ٶȿ���������D�е�����i��̓������ʾ��
���M(j��n)늄әC(j��)�IJ��M(j��n)�r�g���xɢ�ģ����Ĺ����^������һ��ͣһ�µ�ѭ�h(hu��n)�^�̡�ֱ��1ֻ��������ٶ����������Q���nj�(sh��)�H���ٶ�������
��to�r���M(j��n)�o�}�_mo�����M(j��n)늙C(j��)��һ������λ�ƞ�l�����g��ti��ģ��ڕr���M(j��n)�o�}�_mi�����������M(j��n)�ڕr�g�^(q��)�g��ƽ���ٶ���
ƽ���ٶ�������Dla��ֱ����aibi��ʾ���B�Y(ji��)0��bi���c(di��n)������ʹֱ��obi�������ٶ�����i�غϣ��etiҎ(gu��)�M��
(a)����i������������������������Kֹ�ٶ���v2��v3֮�g�ļ���ԭ������obibzb
(b)�c����i����(y��ng)��λ��һ�r�g����
(c)�c����i����(y��ng)���M(j��n)�o�}�_����
��l�������ɂ��M(j��n)�o�}�_mf_j��mf�ĕr�g�g������λ��s����vi�鲽�M(j��n)늙C(j��)�ڕr�g�g��( t/-/��ff)��ƽ���ٶȣ���λ�������룩���t
������(y��ng)��ƽ���ٶ������քe��ֱ���κ�ai+ibi+i���B��bi��bi+i���c(di��n)��ֱ��bibi+i����������i�غϣ��tt횝M��
���s��vo=o�r����������(4)ʽ�_��ti������(2)ʽ���o���ĽY(ji��)����
�@���ٴΏ�(qi��ng)�{(di��o)ָ����y�Dz��M(j��n)늙C(j��)�ڕr�g�g��t.��(n��i)��ƽ���ٶȣ�(3)ʽ��һ�����_�Ľ������_(d��)ʽ���ٛQ�����M(j��n)�oһ�����ĩ�ٶȡ����M(j��n)늙C(j��)��f���r�̵�ĩ�M(j��n)�ٶ�vi�nj�(sh��)�Hλ����������Dlb��������ʾ����ti�r�̵��о���б�ʣ���(sh��)�Hĩ�ٶ�vi���y�ý���ʽ��ʾ�����\(y��n)�ӌW(xu��)Ҏ(gu��)�ɟo���������i�nj�(sh��)�H�ٶ�������Ҳ�o���������ti�r�̵��ٶ�ֵ���ڡ�i��
������ķ������Կ������M(j��n)늙C(j��)���ٶȿ��ƌ�(sh��)�H���ǰ��ּ��{(di��o)�ٷ�ʽ�M(j��n)�еġ�һ����r�£��Kֹ�ٶ��������LjDl���ϵĈA���c(di��n)����ô�ù�ʽ(4)�o���_����������һ���}�_�r�g�g��l��(y��ng)ȡ
��(d��ng)����ʽ���Ҷ˞��(y��n)��ʽ�r���˕r���M(j��n)늄әC(j��)��t��(n��i)��ƽ���ٶ������Dz��������ٶ�����i�غϣ���λ������i���·������r늄әC(j��)�����һ���ļ��ٶ�a
��(d��ng)����ʽ(5)���Ҷ˵ĵ�̖�����r�����������ٶ������ϵ�һ���c(di��n)�����зQ�B�Ӿ��������ԭ��������
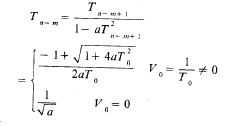
���һ���M(j��n)�o�}�_�ĕr�g�g������������֪�ĵV�����������(4)ʽ���Է��^���_��t��
������ԭ�������������ٶ������غϣ��t��(6)ʽ�f��m����
������ԭ�������������ٶ��������غϣ��t��
|