һ�N���ಽ�M늄әC�ļ������·
�X����Ϻ�����ƌW�о�����
�S�����ؼ��g�İlչ���e��Ӌ��C���Ƽ��g�İlչ�����M늄әC����һ�N�ŷ�늄әC�õ�������V���đ��á���һ���Ԅӿ���ϵ�y�Ќ�һЩ������Ϣ�D�Q�������ľ�λ�ƻ��λ���DZز����ٵģ������M늄әC�Ĺ������c�����܉�M���@�NҪ������������ڿ���ϵ�y����������Ԫ��������Ԫ����
���M늄әC�ă��cʮ���@������Ҳ��һЩ����ĵط������粽�M늄әC��ͨ�^�������}�_�Ŀ��Ɓ������ģ�ÿ��һ����Ҫ�a��һ������Ӻ��������e�ǹ����ڵ��l�Εr���@�N��ӕ�Ӱ푼ӹ������ı���❍�ȡ�����ʹ���M늄әCҲ�����B�m�\�D���ŷ�늄әCһ��ƽ�����\�D����Ҫ�pС���M늄әC�IJ���ǣ�����С����ǵIJ��M늄әC���Cе�ӹ����y����ˣ����Ӿ�·���֣��lչ��һ�N�Q�鼚�ֵ��ӷ��������Ľ�Bһ�N���ü��ɻ���hf-2���M늄әC�h�η����������·��������ʮ���ļ����ӵľ�·�����б�Ҫ���������о�·��ԭ���ɘ��ɼ���������ľ�·����
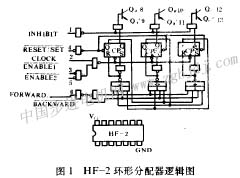
1hf-2���������ƭh�η��������ü����·Ҏģ�����·
hf-2�h�η�������һ�N����ttl�ļ����·����Ҫ���c��hf-2��һ����Ҏģ�����·��ȫ����������·������һ����о֮�У����������ϵ�y�Ŀɿ��ԣ�ʹ�õ��Դ늉���5v����ֱ���c�F�r��С�ͻ���Ӌ��Cϵ�y����ϣ��·ݔ�������������^�������c���ʷŴ�����ϕr���ɺ��������·���OӋ����������߉�OӋ��ֿ��]���Ñ��ĸ��NҪ���нӾ����ӣ�ʹ���`������c��
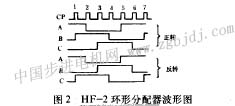
hf-2�h�η�������߉�D�Լ����ΈD�քe��Dl�͈D2��ʾ��
hf-2�h�η�������-�N����ttl��λ����λ���ƶˣ���һ�����ƽ�������� ̖����ʹ��·�е��|�l��oa�á�l������ʹq b��qc�á�d�����ھ�·���������r���˶ˑ����ָ��ƽ�����D���D���ƶˡ���ݔ����̖����ƽ�r�����������D������ƽ�r�����������D��Ƕ˦�r�����c���M늄әC���ƽӿ��еķ���λ���B��
cloc�ߞ�r��}�_ݔ��ˡ���·��ݔ���}�_�������������¿����һ�������D���D�IJ�����
�}�_�����Sݔ��ˡ��ĈDl�п�֪��ֻҪ�@�ɂ���̖����һ���ǵ��ƽ���Ϳ�ʹ�r��}�_���õ���·�������|�l����cp�ˡ��t���ɂ�en able���������B�Ӻ����cbusy���B���������е�һ��ǰableݔ����ӽ���+ sv���ϣ���
inhibit���ֹݔ�ĵĿ��ƶ��ӡ�һ������̖׃����ƽ�r��ʹ������������ݔ������ȫ��̎�ڽ�ֹ��B���˕rֻҪ���·���B�ӵî�����ʹ���M늄әC�����@�Mȫ��̎�ڟo���ͨ�^�Ġ�B���@�����ӿ�ʹ�Ñ����{�C�У�������ϵ�y����λ���o�Ȏ������㣻���⣬�@������߀�ɽ�Qϵ�y����Щ���r���õIJ��M늄әC���ܺĆ��}����·���������r����ݔ��ˑ����ֵ��ƽ��
�h�η����������Mݔ�����@Щݔ�����Ӳ����Ǐľ�·�|�l��ֱ�������ģ����ǽ��^��һ���ܵ�inhibitղ̖���Ƶ��c�T��һʳ��늘O�Ͱl��O���_·�����O�ܲŽo��ݔ�����@�N̎����������˷������Ŀ��ɔ_�����������������������ϵ�y�Ŀɿ��ԡ�
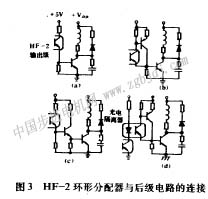
����qa��qc�@���Mݔ���ܲ��ü�늻��Ͱl��O���_·����ʽ�������������ֱ��^��(���OӋ�������_��30ma)���@�͞�hf-2�h�η������Բ�ͬ�ĽӾ���ʽ�c���ʷŴ������B�ӄ����˗l�����D3�����ˎN��hf-2�h�η������c���·���B�ӌ��������ЈD3a����������^С��늄әC���D3b�͈D3c�t�m��j��������^���늄әC���D3d���p�ؽӾ���ʽ�����ϵ�y�Ŀ��ɔ_�������D�п����·�c�������·�ك�ʳ�ؾ�ϵ�y�����gͨ�^������������M�о�Ȧ�B�ӡ�
2����ʮ���ļ����·
���^�����·�������ڿ����·�ϲ�ȡһ���Ĵ�ʩ�Ѳ��M늄әC��ÿһ���ٷֵü�һ�c�������ಽ�M늄әC���������x�õ�늄әC�IJ���Ǟ�3�ȣ�1.5�ȣ��������Ĺ����r�IJ���Ǟ�3�ȣ��������Ĺ����r�IJ���Ǟ�1.5�ȣ����t��������ʮ���ĵļ����Ӻ�ʹÿһ�ĵ��Ӳ����p��0.5�ȡ����M늄әC�ڼ��֠�B�����ڲ����׃С��ʹ�D�ӵ��_�µķ����c�ϕr�����еĹ���Ҳ׃С���Ķ�����@���pС�������·�������Ԍ��F���M�o�����ҿ��� |