���M(j��n)늙C(j��)�ں��հl(f��)��(d��ng)�C(j��)��(sh��)��ϵ�y(t��ng)�еđ�(y��ng)��
������� �����Z�Һ�����܊���չ��̌W(xu��)Ժ�C(j��)е����ϵ��ɽ�|���_(t��i) 264001��
ժҪ����(du��)���M(j��n)늙C(j��)�ں��հl(f��)��(d��ng)�C(j��)��(sh��)��ϵ�y(t��ng)�еđ�(y��ng)���M(j��n)�����о���������Բ��M(j��n)늙C(j��)��Ӌ(j��)��C(j��)����(g��u)�ɵIJ��M(j��n)늙C(j��)ϵ�y(t��ng)�Ĕ�(sh��)�W(xu��)ģ�ͣ������˲��M(j��n)늙C(j��)��(du��)���հl(f��)��(d��ng)�C(j��)�D(zhu��n)�ٔ�(sh��)��ϵ�y(t��ng)��Ӱ푣��o����ϵ�y(t��ng)�ɘ����ڵ��x������(j��)���ó���һЩ����ĽY(ji��)Փ��
�P(gu��n)�I�~�����M(j��n)늙C(j��)i��(sh��)�ֿ���#�ɘ�����
�ЈD���̖(h��o)��tm383.6 �īI(xi��n)��(bi��o)�R(sh��)�a��a ���¾�̖(h��o)��1001-6848(2000)01-0021-03
1 �� ��
�ڰl(f��)��(d��ng)�C(j��)��(sh��)��ϵ�y(t��ng)�У����M(j��n)늙C(j��)��һ��(g��)��Ҫ�Ĉ�(zh��)��Ԫ����������ֱ��Ӱ�������(g��)����ϵ�y(t��ng)��Ʒ�|(zh��)ָ��(bi��o)�����P(gu��n)���M(j��n)늙C(j��)���о�Ŀǰ��������늙C(j��)���������](m��i)�Ќ�늙C(j��)�cӋ(j��)��C(j��)����ϵ�y(t��ng)(li��n)ϵ����(l��i)���]���������Ĕ�(sh��)�W(xu��)ģ���A�κܸߣ�������һ�M�Ǿ����ַ��̽M���@��(du��)�l(f��)��(d��ng)�C(j��)��(sh��)�ֿ��������O(sh��)Ӌ(j��)��ʮ�ֲ���ġ������C(j��)���ƵIJ��M(j��n)늙C(j��)ϵ�y(t��ng)�ڹ��I(y��)�^(gu��)�����m�Б�(y��ng)�ã������{(di��o)��(du��)���c���հl(f��)��(d��ng)�C(j��)���һ��׃���^���������������푑�(y��ng)Ҫ���^�ߵĺ��հl(f��)��(d��ng)�C(j��)��(sh��)��ϵ�y(t��ng)�Ĉ�(zh��)��Ԫ���б�Ҫ��(du��)�䔵(sh��)�W(xu��)�����������������M(j��n)�Ќ��T�о���
2 ���M(j��n)늙C(j��)ϵ�y(t��ng)�Ĕ�(sh��)�W(xu��)����
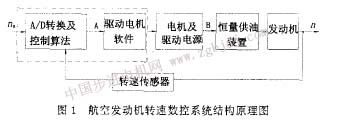
�Բ��M(j��n)늙C(j��)�����(zh��)��Ԫ���ĺ��հl(f��)��(d��ng)�C(j��)�D(zhu��n)�ٔ�(sh��)��ϵ�y(t��ng)�Y(ji��)��(g��u)ԭ����D1��ʾ[1]��
ԓϵ�y(t��ng)�У����M(j��n)늙C(j��)����Ӌ(j��)��C(j��)���Ƶģ�̓����Ӌ(j��)��C(j��)��(n��i)��ܛ�����֡����M(j��n)늙C(j��)ϵ�y(t��ng)ָ���LjDl��a�c(di��n)��b�c(di��n)�ĸ��h(hu��n)��(ji��)����ȡ���M(j��n)늙C(j��)ϵ�y(t��ng)�Ĕ�(sh��)�W(xu��)ģ�ͼ�������늙C(j��)�����Ą�(d��ng)���ԣ���������Ӌ(j��)��C(j��)�c���M(j��n)늙C(j��)��(li��n)ϵ���@����ȡ��ģ�;��Б�(y��ng)���ԣ���ֱ�����ھ���ԓ��(zh��)�ЙC(j��)��(g��u)��ϵ�y(t��ng)�С�һ��(g��)����IJ��M(j��n)늙C(j��)���d�r(sh��)���\(y��n)��(d��ng)���̞�[2]��
�β�푑�(y��ng)ʧ�{(di��o)�Ǧ�e-��׃������sin (��e -��)�֦�e-�ã�����ֹʽ���ã�
��֪����(d��ng)���M(j��n)늙C(j��)����һ��(g��)�}�_�r(sh��)������һ�㾀������ϵ��(sh��)�^С������늙C(j��)��푑�(y��ng)��һ��(g��)˥�p����ʎ�^(gu��)�̡�
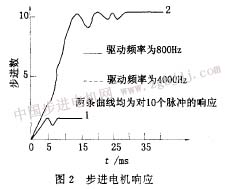
���M(j��n)늙C(j��)����(sh��)��r�ǽ���һ�B���}�_�ġ��B�m(x��)���M(j��n)�ģ���ಽ푑�(y��ng)һ�㲢���džβ�푑�(y��ng)�ĺ�(ji��n)�ε��ӣ��@ȡ�Q���(q��)��(d��ng)�}�_�l�ʵĴ�С���l�ʲ�ͬ����(du��)늙C(j��)�D(zhu��n)��(d��ng)��Ӱ�Ҳ�Ͳ�ͬ�����^���l������(n��i)���(q��)��(d��ng)�Դ�ڲ��M(j��n)늙C(j��)ÿ���M(j��n)һ����ȫ��(w��n)���Űl(f��)��һ��(g��)�(q��)��(d��ng)�}�_���������J(r��n)��ಽ푑�(y��ng)�džβ�푑�(y��ng)�ĵ��ӡ��D2�Dz��M(j��n)늙C(j��)ϵ�y(t��ng)�ಽ푑�(y��ng)����������1��ʾ���M(j��n)늙C(j��)�ڸ���늙C(j��)****����(d��ng)�l�����\(y��n)�е�푑�(y��ng)���ɿ�������ԓ�l���¹�����늙C(j��)�����ʧ��������2��ʾ���M(j��n)늙C(j��)�ڵ���****����(d��ng)�l�ʡ����l����^(q��)֮�⣨�l�����ڵ��l����^(q��)֮��(n��i)����ʧ�������l���(q��)��(d��ng)�µ�푑�(y��ng)���ɿ�����늙C(j��)�����Բ�ʧ�����\(y��n)�С�
 �ڰl(f��)��(d��ng)�C(j��)��(sh��)��ϵ�y(t��ng)�У�ÿ��(g��)�ɘ��g���(n��i)�����M(j��n)늙C(j��)ϵ�y(t��ng)��������һ��(g��)������������ԓ���������Կ���һ��(g��)��(qi��ng)���ɿ����㷨��Ӌ(j��)�����_�����}�_���}�_��(qi��ng)���cԓ�ɘ����ڃ�(n��i)���M(j��n)늙C(j��)��(y��ng)�ߵIJ���(sh��)����(du��)��(y��ng)���˕r(sh��)�����M(j��n)늙C(j��)ϵ�y(t��ng)��(du��)ԓ�}�_��푑�(y��ng)��һ��(g��)�ಽ푑�(y��ng)���ɴ˸���(j��)�D2������2�����Խ����J(r��n)�飬���}�_푑�(y��ng)��D3��ʾ���D3�еĿڽ����S�}�_��(qi��ng)�ȶ�׃���ģ�t��ɘ����ڡ�
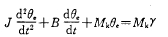
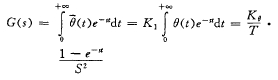
�O(sh��)g(s)�鲽�M(j��n)늙C(j��)ϵ�y(t��ng)�Ă��f����(sh��)��
��(t)��ϵ�y(t��ng)�Ć�λ�}�_푑�(y��ng)��
��(f)��ϵ�y(t��ng)���}�_푑�(y��ng)��
�t��(t)=k1��(t)���ɾ���ϵ�y(t��ng)�}�_푑�(y��ng)�����|(zh��)���䲽�M(j��n)늙C(j��)ϵ�y(t��ng)�Ĕ�(sh��)�W(xu��)ģ�͞飻
3 ���M(j��n)늙C(j��)ϵ�y(t��ng)�����Է���
|