���M늄әC������ӵĆιܺ��p�ܿ��Ʒ�ʽ
�� ��1��������2
(1���麣�\��늙C����˾���V�|�麣519001��2�������I���I��W�������������I15 0001)
ժҪ�������ʽ���M늄әC��������еĆιܿ��Ʒ�ʽ���p�ܿ��Ʒ�ʽ���Է������^��ָ���˃��ߵđ���ԭ�t�����H�����C�������еķ�����
�P�I�~���������i�ιܿ���l�p�ܿ���
�ЈD���̖��tm301.2 �īI���R�a��a ���¾�̖��1001-6848(2000)02-0015-03
1 �� ��
�����ʽ���M늄әC���ӿ�����Ҫ�w�F�錦���D��ʸ���Ŀ��ƣ����@�M���ֱ���c�D�����P����˿����f���ʽ���M늄әC���Ӽ��g��Ҫ������Ŀ��Ƽ��g������Ϳ�������ɿ��Կ���푑����Զ��@�ÏV���đ��ã��ڲ��M늄әC���I��������ӵIJ��M늄әCϵ�yҲ�ѳɞ鮔���������ȫh�������·�ܷ���،��F������p�O�Կ��ƣ��������͵Ļ��ʽ���M늄әCϵ�y�ЏV���������@�N�·�Y�����@�N�·�Y��������Ϳ��ƵĔز��P�����g�ЃɷN�����m����ʽ�����ιܿ��Ʒ�ʽ���H�P���_ͨ���Ǿ������رۻ���ۣ����p�ܿ��Ʒ�ʽ��ͬ�r�P���_ͨ���Ǿ��ϵ��ϡ���ۣ������Č��@�ɷN�m����ʽ���Է�����ָ������ԭ�t��������C�����еķ�����
2�ιܿ��Ʒ�ʽ���p�ܿ��Ʒ�ʽ
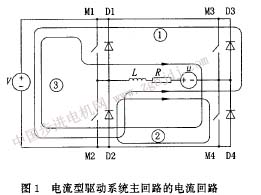
������ӵģ����ࣩ���ʽ���M늄әCϵ�y�Y��������ԭ��ԔҊ��[1]������ڔ������@������P�����·ʾ�ڈD1��ml��m2��m3��m4���������_�P��dl��d2��d3��d4���c֮���P�����Ԟ���ӵ���ɞ鹦�ʹ��w�ȏͺϣ����m�����O�ܡ�l��r��Խ�t�քe��ʾ���@�M��늸С���輰���D늉����D�л�·ʾ�_�Pml��m4�_ͨ���Դy�ӵ��@�M�ϵ�ͨ·����·�لt���m�����O��d2��d3���@�M֧·l��r�����Դv���ɣ���ʾ����·����������^�O�����ֵ�r��ml��m4�P�࣬�@�M��d2��d3���Դy�����������l���m������·����d2��m4���@�M֧·l��r��u���ɣ���ʾ����·����������^�O��ֵ�r���Hml�P�࣬�@�M��d2��m4�m����
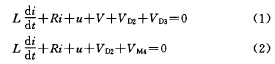
���ó���·�١��ڵĻ�·���̷քe�飺
��ʽ(1)��(2)֪�������]�m�����g����Ľ���Ҏ�ɕr����Ҫ���]�������У�늙C�����ą���l��r�����D늄�ϵ���c�����c���P�����m����ʽ���\���l��fm���ż�늉�y���ز��l��fpwm�ȡ��������صIJ�ͬ�M�ϛQ�����m�����g���׃����Ҏ�ɣ�����ͬ�����׃���l��ֱ��Ӱ���ϵ�y���\�����ԣ���Ҫ���\��ƽ���ԡ�Ч�ʡ��ɿ��Եȡ����溆�������،��m�����g���׃����Ӱ푣�
(1)�@�M늸м����r���m����Ӱ�
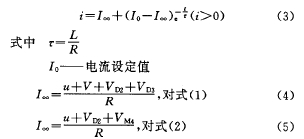
���ٶ��������ز�׃�r��ʽ(1)��(2)��һ�A�ַ��̣�������ʽ�飺
��֪�@��һ�Nָ��˥�p׃��Ҏ�ɣ�lԽ��rԽС�����˥�pԽ������֮�����˥�p�ٶ�Խ�졣
(2)�m����ʽ���m����Ӱ�
�������]�������ؕr�����^ʽ(4)��(5)�ɿ����p�ܿ��Ʒ�ʽ�m����100С�چιܿ��Ʒ�ʽ�r���t��ʽ(3)֪�p�ܿ��Ʒ�ʽ�m�������˥�p���졣��ˣ�Ҳ�Ќ��p�ܿ��Ʒ�ʽ�Q����m����ʽ�������ιܿ��Ʒ�ʽ�Q�����m����ʽ�ġ�
(3)�\���l��fcp���m����Ӱ�
�\���l��fcp��ҪӰ����D늄ݴ�С��һ���S�\���l�����ߣ����D늄ݷ�ֵ���������ڲ��M늙C���l�\�Еr�ʲ��B�m�IJ��M�\�Р�B����������D늄ݲ����^����s�����Ǐ�����j�Ͽ����������ҷֲ����ڿ��d�r���D늄ݲ��γ�ǰ�����늉���ָ�����������ǣ��ҽӽ���2���S��ؓ�d������u�pС�����D늉�u�c���늉���ָ���������λʾ��D��D2��ʾ��
|