dsp�ڟoˢֱ��늄әC�ŷ�ϵ�y�еđ���
��i���� ������ ��
(����������W�Ԅӻ����g�о������������710048)
ժҪ������tms320f240ϵ��dsp���m�����\�ӿ��ƵĹ����OӋ��ȫ���֟oˢֱ��늄әC��λ���ŷ�ϵ�y������Ԕ����B��dsp��Ӳ���OӋ�еđ��ú�ܛ�����ɣ�������ģ������Ԫ���m�������pģ���Ʒ����M��λ�ÿ��ƣ����Y����������ϵ�y�OӋ���Ρ����С���Ч������ȡ���^�õĿ���Ч����
�P�I�~��������̖̎�������oˢֱ��늄әC}ģ����Ԫi�pģ����
�ЈD���̖��tm301.2 �īI���R�a��a ���¾�̖��1001- 6848( 2000) 02 - 0021- 04
1 �� ��
�S����Ӽ��g�İlչ���ŷ�ϵ�y���õ�̎���������ܲ�����ߡ��m����늄әC���ƵĔ�����̖̎�����ij��Fʹ���ܸ߽Y����ɜ��ȫ�����ŷ�ϵ�y�ɞ���ܡ����đ��þ������µ���Ҫ���c[1]��
���\���ٶȿ죬ָ�����ڞ�50ns��
��32λ����̎���Ԫ��16λ���c�\�㡣
��ָ���S�������І�����ѭ�hָ������ڳˣ���ָ��Ϳ���fft׃�Q��ַ������
��������Ʋ����ļ���ˮ�����I�����������ⲿ�Д�Դ�Ͱ˼�Ӳ���ї���
��544�֡�16λƬ��ram��16k�֡�16λƬ��flash eeprom��224k�֡�16λ****�Ɍ�ַ�惦���g��
���p10λa/d�D�Q���������D�Q�r�gС��10ns.
���¼��������о���12·���^ʽpwm�l����Ԫ��3��16λͨ�ö��r��Ӌ������4�����@��Ԫ��
�������i��h�r犆�Ԫ�Ϳ��T�����r�Д�ģ�K��
�����д���ͨӍ�ӿںʹ������O�ӿڡ�
��28���ɾ��̏���i/o��
���ij��������dsp�ṩ�ĸ��N���ܣ��OӋ�˽Y�����Ρ����o�����Rȫ�ğoˢֱ��늄әC�ŷ�ϵ�y��ᘌ�tms320f240 dspܛ�������д��ڵ�һЩ���}�o���˾��̼��ɣ�����B��ģ������Ԫ���m�������pģ���Ʒ����͌��Y����
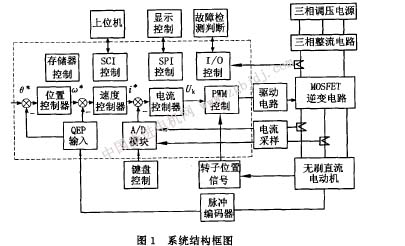
2ϵ�y���OӋ
�OӋ���ŷ�ϵ�y�Y����D��D1��ʾ��
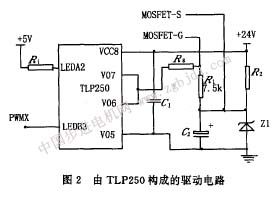
2.1������������
ϵ�y��Ԫˢֱ��늄әC���÷���Ԫ�����ɵ���׃���ӣ���׃���й���Ԫ�������·������dsp��pwmݔ���ӿڣ���tlp250����xԪ�����F���·�ccpu�ĸ��x������ͨ���������Ė�Դ֮�g����5v�ķ���늉������C�˹��������Ŀɿ��P�ࡣ���·ԭ��D��D2��ʾ��
2.2������ɘ�
����z�y���ô�ƽ��ʽ����Ԫ��������ɘ��·ԭ��D��D3��ʾ�����ɘӵ�С�����̖�D�Q��늉���̖����ͨ�^�ƽ�D�Q�Ŵ�����ؓ�O�Ե����������̖׃�Q��o��5v늉���̖ݔ��dsp���pa/d�D�Q��Ԫ��
2.3λ�ú��ٶșz�y
��늴a�Pݔ���Ĺ���}�_ͨ�^qep�·����dsp�����ٶȺ�λ�õķ�����̖��qep�·���Ԍ��F������}�_��4���l����Ӌ�����Ķ������������ٶȺ�λ�õęz�y���ȡ�
2.4�D��λ����̖�z�y
�oˢֱ��늄әC�������D��λ����̖��dsp�Ŀɾ����Д�intxݔ�룬������һ���D����̖�l��׃���r���a���Д࣬���Д�̎�������и�׃ac-tr��ֵ����pwmݔ����̖��
2.5�I�P���@ʾ�·����λ�C�O�صČ��F
����dsp��a/d�D�Q�·���F�˺��οɿ����I�P�·�����²�ͬ���I����������ͬ��ald�D�Qֵ���c����i/o�ڵ��I�P�OӋ��ȣ��@�N�I�P���OӋӲ����ܛ�������Ӻ��Ρ���������dsp�ĸ��ٴ�������ӿںʹ����@ʾ��оƬmax7219�OӋ���@ʾ�·���H��3��i/o����������8λled���a���@ʾ�������O����5λled���a�������@ʾϵ�y�\�е�һЩ��B�ͅ�����ϵ�y������ds |