���ಽ�M(j��n)늄әC(j��)ϵ�y(t��ng)���l�\�Р����D(zhu��n)�ص�����
�� ��1���� ��1���n���r2������-2
��1���麣�\��늙C(j��)����˾���V�|�麣519 001;2�������I���I(y��)��W(xu��)�������������I150001��
ժҪ���o��һ�N����a��?sh��)ķ�����ʹ�ð벽��ʽ�\�еĶ�����ʽ���M(j��n)늄әC(j��)�͠��������ڸ��l�\�е�һ���l��(n��i)������ߣ�������ԓ늄әC(j��)ϵ�y(t��ng)�Ŀ��ù��ʣ�
�P(gu��n)�I�~�����ʽ���M(j��n)늄әC(j��)���(q��)�������������ԣ�������ο���
�ЈD���̖��tm383,6 �īI(xi��n)��(bi��o)�R�a��a ���¾�̖��1001-6848(2000)03-0007-03
l �� ��
�������l�����Dz��M(j��n)늄әC(j��)���������Ҫ���\�����ԣ���ߠ����D(zhu��n)�أ��،��\���l��һֱ���о��������ҪĿ��(bi��o)֮һ���īI(xi��n)[1]����B��һ�N���Ό��õķ���������ʹ�벽��ʽ�\�еĶ�����ʽ���M(j��n)늄әC(j��)ϵ�y(t��ng)���ڿɿ��l��(n��i)�Ġ����D(zhu��n)��ֵ������ߣ�������(sh��)��(j��)��ٷ�֮10��18������ijһ�R����l�ʣ�fcp> fo�r��������Ʋ������ã����H���ѳɞ�һ����늉����(q��)��ϵ�y(t��ng)�������D(zhu��n)���c�@�M�����׃��������(y��ng)���S�l�ʵ����߶��½������Ľ�B�ķ���������fcp>fo�r��ȡ����a����ʹ�à����D(zhu��n)���Բ��½����ஔ(d��ng)������˿ɿ��l�ε��I(l��ng)��������ԓ늄әC(j��)ϵ�y(t��ng)�Ŀ��ù��ʡ�
2����a��?sh��)�ԭ�?/b>
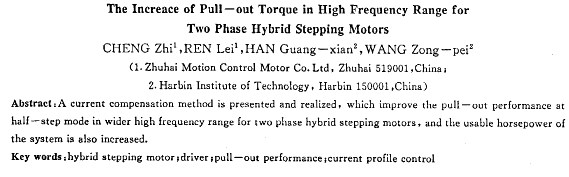
�������ʽ���M(j��n)늄әC(j��)���(q��)��ϵ�y(t��ng)�����Dz���������ο��Ƽ��g(sh��)�����@�M������M(j��n)�п��ƣ���ԭ����D��D1��ʾ��
���ȡ���·���@�M�����Ӎ̖׃�Q��늉�Ӎ̖���c���������ָ�������Ӎ̖����(y��ng)��늉�Ӎ̖�ڱ��^�����M(j��n)�б��^��һ���@�M��������^��������������������ݔ���ز��P(gu��n)��Ӎ̖��ʹ���@�M����� ۙ�������׃����
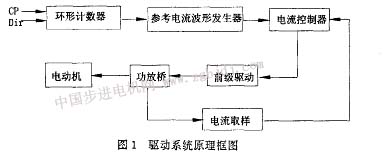
�Զ���늄әC(j��)�벽��ʽ�������o���ą������������D2a��ʾ������һ�������A�ݲ����@���w�Ͼ������@�M����ڿɿ��l��(n��i)�IJ��Σ��S��fcp�����@�M����Ļ���늴����ڿs�̣���������������l�����ߣ��@�M�迹�������D(zhu��n)늉����l�ʺͷ�ֵҲ����(y��ng)����ʹ���@�M��(n��i)���ֵ�½���fcp���^ijһ�R��ֵ��fo���r���@�M��������_(d��)����ֵ�_ʼС��i������������ڵ�3�������}�_���ڃ�(n��i)�㲻��ݔ���ز��P(gu��n)��Ӎ̖������foҲ�Q��ȫ��(d��o)ͨ�l�ʡ�fe��>fo�Q�鲻�ɿ��l�Σ����@�M����ķ�ֵ�½�����D2b��ʾ���D��б�����ֱ�ʾ����p�ٵIJ��֡�б�����ֵ���e�S��fcp���߶��Ӵ�����(y��ng)�ؠ����D(zhu��n)�ر��½���
�D2b��ʾ����3�������}�_���ڃ�(n��i)������ɿص���r�����������}�_���ڃ�(n��i)��������ܿصģ��@Щ�ܿ������ֵ��С���@�M��������_(d��)����ֵ�����Կ����������׃������Σ��Ğ鷽������������ֵ��������ƣ��t�@�M���������ֵzp�ķ�����ۙ����D2c��ʾ���c�D2b���@�M���������������ˈD2c�е�б�����֡�����(y��ng)��늹��C(j��)�Ġ����D(zhu��n)��Ҳ��������ߣ�ʹ�à����D(zhu��n)�ص��½��������һЩ���l�����ƣ��@��������a��?sh��)�ԭ���?/div>
늄әC(j��)�ą�����������Ǹ���(j��)Ҫ��IJ���Ǻͺ����IJ��M(j��n)�\�Ё��_���ģ��چβ��\�к͵��l�\�Еr��Ҫ���ء����l�����ߕr�����M(j��n)늄әC(j��)���H��̎��ͬ��늄әC(j��)�\�Р�B(t��i)����Ҫ��늄әC(j��)���D(zhu��n)�ٸ�ۙcp�}�_Ӎ̖���@ֻҪ���@�M����Ļ���늴����ڲ���׃�����_(d��)����Ԕ��(x��)���������Ӱ푲����@��������������a���������Ԍ�ʩ�Ļ��A(ch��)��
3���ʾ��
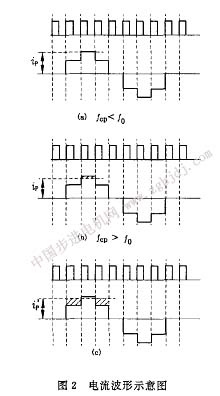
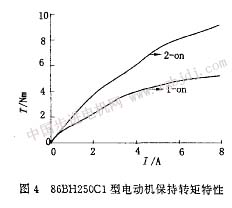
��ԇ늄әC(j��)���麣�\��늙C(j��)����˾���a(ch��n)��86bh250c1(4)��86bh250c1(8)��늄әC(j��)����̖��(n��i)�Ĕ�(sh��)�ִ����~���������늄әC(j��)��������D3��ʾ������ԭ��86bh250b��늄әC(j��)�����γߴ�����������D(zhu��n)�����^����ߣ��cԭ��86bh250c��늄әC(j��)��ȣ��@�M늸�С�ö࣬���m����Ҫ������\�еĈ��ϡ������D(zhu��n)��������D4��ʾ��
|