���ʽ���M늙Cspwm���Ӽ��g���о�
�� �������d��
(�㽭��W���㽭���� 310027)
ժҪ�����ܛӲ���Y�ϵĔ���ģ�M���Ƽ��g���F���ۙ�ͻ��ʽ���M늙Cspwm���ӣ�ʹ���ʽ���M늙C��������ӽ����Ҳ����Եõ���ͬ������늄әC�ĈA�����D�ň�����������˲��M���r��ͬ�rʹԓ���Դ���\
���ڔ����ŷ��{��ϵ�y��
�P�I�~��spwm���M늙C������
�ЈD���̖��tm301.2 �īI���R�a��a ���¾�̖��1001-6848(2000)03-0016-03
1�� ��
���M늙C�ڹ��I���Ƶĸ����摪��ʮ�֏V��������Ҫ���c���_�h�\�еęC�ƫ@���˽ӽ��]�h���������ܡ����ڿ���Ҫ��ߵĈ��υsֻ���Î�λ���]�h��ֱ��늙C��ϵ�y�ɱ�������ӡ�
��Փ�ϣ�ֻҪ��һ�������o���ֱ�ɿ������B�m�\�С����H����Ԫ���������ƣ��m������ȫ�B�m�\�У�����������r�����ܝM�㾫��Ҫ���Č��F�����ӷ���������������׃�����m�Լ��ƏV�ărֵ��
2ԭ��
�Զ�����ʽ���M늙C�������Ƚ�B�D�ر��_ʽ�͈A�����D�ň�����ʽ��
������Ԝu�����Ч���������Ǿ������أ������ط��̞顣
���M�м��֣�����������顣
j���~��������ڞ�r�g��������ֵ����Ҫ��IJ��Mλ�á����d�r���D�ӵ�ƽ��λ�ÛQ������Ҋƽ��λ���Ƅ���a�ǣ�Ҳ������Ҫ�Ľ�λ�ơ�
�������Q�@�Mͨ��������Q������ܮa���A�����D�ň����@�����������a���Ĵ��������飺
a���b��Ĵ���ʸ�����L���������r��ȣ����䷽�����S�r�g��׃���ڿ��g�M�����D��
3ϵ �y
����ϵ�y��Ҫ������̖�l���h��������pwm�ز��h�������e�ӭh����ȫh������·4���֘��ɡ�
3.1�����������a��
����c��matlab���Z�Ԍ����Ҳ��M��3600n�����Ѿ��֣�����Ҫ�������Ͱ�3600���ֳɶ��ق��ɘ��c��������ɘ��c������ֵ��Ȼ��
�õ��ĸ��c���M��2�M������̎����ᘌ�8λdla�D�Q�õ�2�M��ƫ���������˔���ݔ��eprom���@�Ӕ���̎����������ɡ�
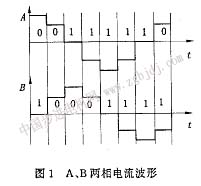
��8���������D1�Ѕ�������֮�g��900����λ�����ȫh��ͨ��Ҫ��ϵ�y����،�ÿ����������ֵ��������˃ɷN���Ơ�B��ͬ�����Ƙ�ӛλ������������c�˞�0����������c�˞�1��С������c�˞�1�����Ƙ�ӛo��ʾԓ����ͨ��1��ʾԓ���ֹ���@Щ��ӛ�ͅ�������ֵ�ַ��ڲ�ͬ��eprom�У�������һһ�����ش������ͬ�ĵ�ַ�£��Ա�ͬ������Ӌ��������ַͬ���x����ԓ���Ƙ�ӛ�Á�����tl494�����^�ˣ��Ķ�����pwm��̖��ݔ�����@��̎���ĺ�̎�Ѓ��c��һ�ǿ��Ƙ�ӛ�ͅ������ε�ݔ����ͬ���ģ�����ÿ����̖������Ȼ�Ę�ۻ��i�r�g�����������ε���ֵ�������Ę�ӛ1����1�r�P����ۣ�������ֱͨ�F����������λҊ�D1��
3.2����̖�l���h��
ͬ������Ӌ�����Ƀ�Ƭcd4516���B���ɣ����߹���ͬһ��������̖���ƣ��Ա�����ѭ�h��׃�M��Ӌ������λӋ������cp�}�_�ɵ�λӋ�������Mλݔ�����롣8λ����ݔ�����Ɍ�ַ256����Ԫ��27c64�кܶ�퓣��@������4퓣����4�n����������ֵ����8��32��64��128��4�N��퓵Č�ַ�ɸ�λ��ַ������ɡ�
3Ƭeprom�քe���a�࣬b�࣬���Ƙ�ӛ�����п��Ƙ�ӛeprom��do��dlݔ��a��-a��ͨ����̖��d4 |