�p��������D������늄әC���Ƽ��g
�R���䣬���l�����_ ��
(�������I��W�Կ�ϵ���������710072)
ժҪ����B��ϡ�������p��������D������늄әC(latm)λ���ŷ�ϵ�y����ԭ��������ϵ�y��늚ⶨλ���D���c��λ�Ɯy�����ٶ�λ���p�]�h���p��ȿ��Ƶ��M�����о������нo�������P���F�·������ϵ�y���漰���Y���M���˷�����
�P�I�~�������D�ǣ�����늄әC��늚ⶨλ��ֱ���ӣ�pwm����
�ЈD���̖��tm351 �īI���R�a��a ���¾�̖��1001-6848(2000)03-0024-03
1 �� ��
�����D������늄әCλ���ŷ�ϵ�y�������Ƕȷ������ܿ������D�͜ʴ_��λ�Ҿ����^�������ֱ����ϵ�y���@�Nϵ�y���ں����ŷ��y����C���ӡ��C�����P�������_�쾀���C�d�����ȸ߾���늚��ŷ��ýy���������ǶȃȌ�ؓ�d��ֱ���ӡ�������80���ĩ�ь������ں������w���M�b�ú��l�Ƿ���x�����R�C���ľ��ܿ��Ƶȸ��g�I��[1]�������ȃH��ָ��ӷ����M���^�о������ڲ��Ï��ɶ�λ���侫�Ȳ��ߡ���������Ҳ�o���M��߹����ܶȺʹ���ֱ���ӵ���Ҫ�����Ľ�Bϡ�������p��������D������늄әCλ���ŷ�ϵ�y�Ĺ���ԭ��������늚ⶨλ���D���c��λ�Ɯy�����ٶ�λ���p�]�h���p��ȿ��Ƶ��P�I���g�M�����о����Y��������ԓ����늄әC���ڟo��p�ٽY�����w�eС�������ܶȸߡ�������ϵ�y��λ�ʴ_���\�о��ȸߡ��l푌����ɿ��Ըߡ�
2�����D������늄әCλ���ŷ�ϵ�y����ԭ��
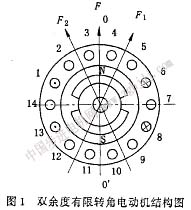
�����D������늄әC�ڶ����ϰ��b늘��@�M���D���ϰ��bϡ�������w���c�oˢֱ��늙C���ƣ��������D������늄әC������һ���@�M������Y������Ҫ�Q��·����Ҳ�������D�ǟoˢֱ������늄әC�����ˌ��F�p��ȿ��ƣ����ϵ�y�ɿ��ԣ�������Ƕ�Ń����@�M������Ƕ�ţ�늄әC�Y����D1��ʾ�����ӹ�14���ۣ�����7��14��ղۣ�1��3��5���һ���@�M�ό�߅��8��10��12������߅��ͬ��2��4��6��ڶ����@�M�ό�߅��9��11��13����߅���@�����@�M�քe�Q��a-a��b-b���@��ÿ���@�M��3����Ȧ�M�ɡ���������늚ⶨλ��ÿ���@�M��һ����Ȧ���鶨λ�@�M��3����Ȧ�������鹤���@�M�����⣬���˜pС�X��Ч�������Ӳ���б�۽Y����
ԓ�����D������늄әCλ���ŷ�ϵ�y���@�M늙C���p��ȿ������͆����λ�Â����������ֽM�ɣ����Ђ�������������ʽ��늾��a��������늙C�ٶȺͽ�λ�����z�y��ϵ�y���������r���p��ȣ���һ����ȹ��ϕr����һ����������������ұ��C���ij���������ȿ����·���ƣ���ϵ�y�p��ȿ���ԭ��D��D2��ʾ��
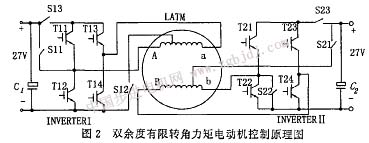 ��ϵ�y�õ�һ���@�M��һ����Ȧ1-8�͵ڶ����@�M�ĵ�������Ȧ6-13���鶨λ�@�M��fi��fz�����λ�@�M�S�������ń�λ�á��O�D�әCе��λ̎��f1��f2�A�ǵ�ƽ�ּ�f̎���ϳɴń�λ�ã�����oo����ô늄әC�����Ƕ�һ����+�ڃȵ��\�Ӿ���00����������������D�ӣ������p���a��b�����@�M�����r�ęCе��λ������ԓo�������ʡ�����a���@�M����늚ⶨλ������sll��s12,�ɂ��^������_�|�^ͬ�r�]�ϡ�1-8��Ȧ��27vֱ��ĸ����ȡ늣��D����λ���D���cfi���R�����^һ���ӕr��sll��s12ͬ�r���_������λ��ɡ�ͬ�rs13�]�ϣ��������·��늣���һ�̶�pwm��̖������׃��i��t1��l(��t��t3)�ܣ���27v�}�_��������3����Ȧ����a-a���@�M�ϣ�ʹ늙C��r����D�����D����λ���^f1��f2�A��ƽ�־�f�r���ù�늾��a���ą�����̖z��z��̖����ǰ�{���˶���f1��f2�ĊA��ƽ�ּ�f������ȥ�|�l�p��ȿ������е��|�l��ʹ��Ӌ����������λ���Ķ����F�Cе��λ�c늚���λ�Ľyһ�����ȫ��늚ⶨλ������z��̖���D�ٿ���ԓpwm��̖��ռ�ձȁ��{����һ���{���������ٸ�׃��늚ⶨλÿ��ֻ����һ���@�M�M�У�����ÿ����늺�ϵ�y�ԄӶ�λ���������g���ٶ�λ���������b�ඨλ������6-13��Ȧ���F����λ������z��̖�^��ֻ��형r��D�ӡ�
��λ����Ժ������Ԅӽ������o����λ��ָ����̖��ʹa��b�����@�M���F�p����ӣ���늾��a�����z�y����λ�÷�����̖���` |