pwm��׃����늴���늄�(d��ng)�C(j��)����(d��ng)�^(gu��)�̷���
����ҫ
(�|�ϴ�W(xu��)�����K �Ͼ� 210096)
ժҪ��������pwm��׃����늴���늄�(d��ng)�C(j��)�Ĕ�(sh��)�W(xu��)ģ�ͣ������A����һ��(k��)������(du��)늙C(j��)����(d��ng)�^(gu��)���M(j��n)�Д�(sh��)�ַ���Ӌ(j��)
�㣬�õ��˴���늄�(d��ng)�C(j��)������(d��ng)������������������늙C(j��)��ϵ�y(t��ng)����(sh��)��(du��)����(d��ng)�^(gu��)�̵�Ӱ푡�
�P(gu��n)�I�~��pwm��׃��������ͬ��늄�(d��ng)�C(j��)������(d��ng)�^(gu��)�̣���(sh��)�ַ���
�ЈD���̖(h��o)��tm352 �īI(xi��n)��(bi��o)�R(sh��)�a��a ���¾�̖(h��o)��1001-6848(2000)04-0009-04
1 �� ��
����ʽͬ��늄�(d��ng)�C(j��)���ڽY(ji��)��(g��u)��(ji��n)�Ρ��������̓r(ji��)�������ͻ����(y��u)�c(di��n)���ܵ��ձ���ҕ�������Ӽ��g(sh��)��Ѹ�ٰl(f��)չ���Ԅ�(d��ng)������Փ��̎�����ďV����(y��ng)�ã������ͬ��늄�(d��ng)�C(j��)�Ŀɿ�׃���\(y��n)���ṩ�����õėl����Ҳʹ�о�pwm늉�Դ��׃����늴���늄�(d��ng)�C(j��)���\(y��n)�����ܳɞ��Ҫ����(du��)����늙C(j��)����(d��ng)�^(gu��)���M(j��n)�з������������о�pwm늉�Դ��׃����늴���늄�(d��ng)�C(j��)ϵ�y(t��ng)���ܵı�Ҫ�ֶΣ�Ҳ���O(sh��)Ӌ(j��)׃�l�{(di��o)�ٴ���늄�(d��ng)�C(j��)���_(k��i)�l(f��)�����ܴ���늄�(d��ng)�C(j��)�(q��)��(d��ng)ϵ�y(t��ng)�Ļ��A(ch��)��
���ĸ���(j��)ͬ��늙C(j��)�\(y��n)����Փ����(d��o)������늄�(d��ng)�C(j��)��dq0����(bi��o)ϵ�y(t��ng)�еĠ�B(t��i)���̣��\(y��n)�����A����һ��(k��)������(du��)pwm늉�Դ��׃����늴���늄�(d��ng)�C(j��)������(d��ng)
�^(gu��)���M(j��n)�Д�(sh��)�ַ��棬Ӌ(j��)��ؚ����늙C(j��)d�S��g�Sͬ��늿���xd/x����d�S��q�S�D(zhu��n)���@�M���r2��r2����ϵ�y(t��ng)�D(zhu��n)��(d��ng)�T���Ȍ�(du��)����(d��ng)�^(gu��)�̵�Ӱ푣������ϵ�y(t��ng)��(d��ng)�B(t��i)���ܣ���(y��u)��늙C(j��)�O(sh��)Ӌ(j��)�ṩ����Փ����(j��)��
2��(sh��)�W(xu��)ģ��
2.1 ����늄�(d��ng)�C(j��)�Ġ�B(t��i)����
�����]����늙C(j��)�F��͡��Ŝ��͜u����Ӱ푣����������@�M��(du��)�Q����늙C(j��)�D(zhu��n)�������@�M�Ե�Ч��d�S�����S�λ�·��ʾ�����������@�M��Ч��d�S��q�S�@�M���õ�dq0����(bi��o)ϵ�д���늙C(j��)��늉����̺��D(zhu��n)���\(y��n)��(d��ng)���̡��x���ӡ��D(zhu��n)���S��������D(zhu��n)���D(zhu��n)�ٺ��D(zhu��n)��λ�ý������B(t��i)׃�����õ�����늄�(d��ng)�C(j��)�Ġ�B(t��i)���̡����Ќ�(du��)��(y��ng)��늉����̵Ġ�B(t��i)���̞飺
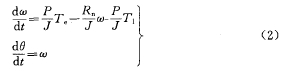
��(du��)��(y��ng)���D(zhu��n)���\(y��n)��(d��ng)���̵Ġ�B(t��i)���̞飺
늴��D(zhu��n)�؞飺
ʽ(1)��(3)�У���(bi��o)d��q�քe��ʾ����ֱ�S�ͽ��S��
2.2pwm늉�Դ��׃��늉���ʾ
ʽ(1)��(2)��ʾ��dq0����(bi��o)ϵ�д���늄�(d��ng)�C(j��)�Ġ�B(t��i)���̣��H�o���˴���늙C(j��)��(n��i)����׃��֮�g���P(gu��n)ϵ���](m��i)�п��]늙C(j��)�ⲿ��늉��ļs���l������늙C(j��)��늉��Ĵ�С��
pwm늉�Դ��׃��ݔ�������늄�(d��ng)�C(j��)��ݔ�룬�ɼٶ�[1]��
(1)ϵ�y(t��ng)ֱ���h(hu��n)��(ji��)��늉��㶨��
(2)�����]�_(k��i)�P(gu��n)Ԫ���Ĺ������^(q��)��
(3)�����_(k��i)�P(gu��n)Ԫ�����������_(k��i)�P(gu��n)��
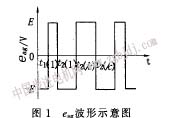
pwm��׃�����p�O���{(di��o)�ƣ�ֱ����(c��)��늉�ֵ��e����׃��ݔ�������늉�r��D1��IJ���ʾ��D��
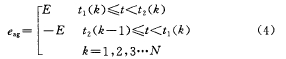
ʽ�У�t(k)��tz (k)��pwm�����_(k��i)�P(gu��n)�r(sh��)�̡���pwm늉���������(du��)�Q���P(gu��n)ϵ��
t��ʾ�{(di��o)�Ʋ������ڣ�����(j��)�a(ch��n)��pwm�����{(di��o)�Ʒ�ʽ�_��[1]�����д���늙C(j��)�Ķ����@�M����y�B�ӣ���������늉��飺
|