늙C�ֲ�ʽ�O�yϵ�y�еĿ���ͨӍ
�R����1�������1���� ˬ2
(1���|�ϴ�W�����K �Ͼ� 210096,2.�Ӻ���W�����K �Ͼ� 210 098)
ժҪ����Ҫ��B��늙C�ֲ�ʽ�O�yϵ�y�п���ͨӍ�Č��F��ʽ�����ط������������ibm - pcϵ���C�c���_
��Ƭ�C֮�gͨӍ���ٶȣ��Լ����ӱ��C��ݔ�����Ŀɿ��ԡ�
�P�I�~��늙C���O�y��ͨӍ
�ЈD���̖��tm301.2 �īI���R�a��a ���¾�̖��1001-6848(2000)04-0054-03
l �� ��
�ڷֲ�ʽ늙C�O�yϵ�y�У�������ibm - pcϵ���C������λ�C�����_�Ρ�Ƭ�C���ɵ����ܜy�x��������λ�C���M��С�ͷֲ�ʽϵ�y������������λ�C�Ć�Ƭ�C�ȿ��Ԫ����M�и��_늙C�Ĕ����ɼ��ͬF�����ƣ��ֿɌ��������ͽopc�C��pc�C�Ɍ��yԇ�����M��̎���ʹ��A�������@ʾ���P�����������Ͳ��Σ��ֿ������Ƭ�C�l����������M�м��п��ơ�Ŀǰ���@һģʽ�ڶ��c�����ɼ�����ϵ�y���ѵõ��ˏV���đ��á����چ�Ƭ�C����ͨӍ�Ŀ��ɔ_�����^�ͨӍ���ʵ���ߣ����`�a�������ܿ��������ڜy�جF�����ڸɔ_���أ��@һ���}����ͻ�����Ķ����ͨӍ�ٶ��cͨӍ�����Ĝʴ_�Ժ�ͨӍ�Ŀɿ��������ɞ�һ��ì�ܡ���ˣ�һ���Ɇ�Ƭ�C�cpc�C�M�ɵĜy��ϵ�y���������ò������^�͵�ͨѴ�ٶȡ���ϵ�y���Ҫ�O�y��늙C���늉����Σ������r���ɼ��Ĕ����M�з���̎����ͨӍ�������^���^�͵�ͨӍ�ٶ��������ܝM��Ҫ���ľͷֲ�ʽ�����ɼ�ϵ�y�������M�п��ٿɿ���ͨӍ�M���о���
2 ���CͨӍԭ��
ͨ��ibm - pc�C���b��urat8250(��16550)����ͨӍ��������ͨ�^����8250�ļĴ��������Կ��ƣ�����λ����5��6��7��8λ����У�λ��ֹͣλ�������ʵȡ��Ķ������c�������И˜�rs232c����
�ڵ�Ӌ��C���O���M��ͨӍ����Ƭ�C(mcs - 51�������ϵ��)������һ��ȫ�p�����Ѝu����ˣ����Ա�Ҫ���ӡ��ƽ�D�Q�Լ����x�·�Ϳ��Ԙ����p����ͨ�Žӿ��·��
mcs - 51ϵ�І�Ƭ�C�Ĵ��п��ڹ�����ʽ2
�������ʹ̶����ͷ�ʽ3(�����ʿ�׃)�r�ж��CͨӍ���ܡ����Է�ʽ2��3�����r���l�ͺͽ��յ�ÿһ����Ϣ����11λ�����е�9λ�ǿɾ��̵ģ�ͨ�^��scon��tb8��0��l���ԅ^�e�l�͵��ǵ�ַ��߀�ǔ���������ęC�Ŀ���λsm2-1���t�����յ��ǵ�ַ���r�������b��sbuf������λri=i����cpu�l�Д�Ո�����յ����ǔ��������t���a���Д࣬����Ϣ�G������sm2=0���t�oՓ����ַ��߀�ǔ����������a��ri-1�Д���־�������b��subf��
�mȻpc�C��8250�������߂�mcs- 51ϵ�І�Ƭ�C�Ķ��CͨӍ���ܣ���ͨ�^ܛ���ķ�������ʹ8250�M���Ƭ�C���CͨӍ��Ҫ�����ǣ�
8250�ɰl��11λ����������ʽ�飺
��mcs- 51��Ƭ�C���CͨӍ�ĸ�ʽ�飺
���ԣ�����ͨ�^����8250����żУ�λ��ʹ���ڰl�͵�ַ�r��1���l�͔����r��0���@�ӣ�����żУ�λ��ģ�Ɔ�Ƭ�C��tb8λ��
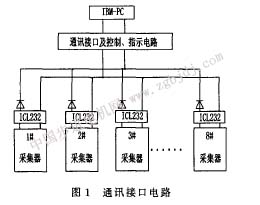
3 늙C�O�yϵ�yͨӍ�ӿ��OӋ
��늙C�O�yϵ�y��1�_pc��8�_��������_��늙C�ֲ��O�yϵ�y�еĿ���ͨӍ �R���� ����� �� ˬ늙C�����ɼ��K�ˡ�ͨӍ�ӿڵ��ƽ�D�Qͨ�^���Դ��icl232���F��������Ƭ�C�İl�_��(txd)ͨ�^icl232�����ö��O�ܸ��x���B���ڴ��п��������B�ӵ�pc�C�Ľ��ն�(rxd)��Ҋ�D1����늙C�^��ɢ���ұO�y�cҲ�c��Ӌ��C���x�^�h���t�����rs422�ӿڣ���75174��75175�M���D�Q��
�D��ͨӍ�ӿڼ����ơ�ָʾ�·���M���ƽ�D�Q�⣬߀��������ɼ����ṩ�Դ�����ɼ���������Bָʾ���Լ������ɼ����M�����P�Ŀ��Ƶȹ��ܣ��@�ӷֲ��ڬF���ĸ��ɼ����ɞ�o�˿��صġ�ɵ�ϲɼ�������
4���ͨӍ�ٶ��c���CͨӍ�����Ĝʴ_��
|