늙C���Ƽ����·���x�ھ��v ֱ���ˢ늙C��������
�u�^��1����ϲ��2��������3���Ǽt��1
��1�������I���I��W�������� �����I 150001��2����c���ﻯ�����S���͏S��3����cʯ�����ֵڶ��Cе�S��
�ЈD���̖��tm381 �īI���R�a��c ���¾�̖��1001-6848(2000)05-0046-02
1 �� �c
(1)����ov��16v��****50ma��pwm�� ݔ����
tpic2101��һ�N����ֱ���ˢ늙C���ƵĆ�Ƭ�����·����Ҫ�Á��a���Ñ����{���̶��l�ʡ���׃ռ�ձȵ��}���{��(pwm)��̖���Կ���ֱ��늙C���D�٣�Ҳ�����ڿ�������ؓ�d���Դ�����ɽ��հٷ�֮0��100��ռ�ձȣ���pwm��̖���Ԅӷ�ʽ����o��2. 2v늉���քӷ�ʽ�������ɃȲ��{�����_�Ĺ�����ʽ�Խ��ܲ�ͬ��ݔ����͡�����ԓоƬ�к��ı��o���ܣ�����˯�ߡ��\�к������N������B��
tpic2101�������Ͼ�������������c��
(2)�����p·�ٶȽo��ݔ��������
(3)����********100ռ�ձ�������
(4)�O�е����<200��a��˯�ߠ�B��
(5)����ܛ���ӡ�
(6)�����^��Ƿ�����o���ܡ�
(7)���Ќ��ⲿfet��igbt���^�����o���ܡ�
2 ���_�f��
tpic2101��dip��so�ɷN���b��14�����_�������_�f��Ҋ��1��
3 �ٶȽo����ʽ
tpic2101���ЃɷN�ٶȽo����ʽ���Ԅӷ�ʽ���քӷ�ʽ�������Ñ�������Ҫ�O�á����Ԅӷ�ʽ���ٶȽo����̖��auto�˵ļ�늘O�_·pwm��
̖��man�˞鸡�ՠ�B�����քӷ�ʽ���ٶȽo��ͨ�^����һ����auto��man�˵Ŀ��{�����ɣ�man�˽ӵ�vh��
3.1 �Ԅӷ�ʽ
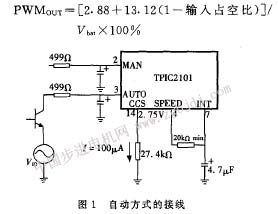
���Ԅӷ�ʽ��auto�ˣ���늘O�_·����һ���ĸߵ��͵���̖��׃��������˯�ߠ�B���ѣ��M���\�Р�B���ٶȽo����Ϣ������ͬһ�˵�100hzpwm��̖��ռ�ձ��С��ٶ���Ϣ�Ƿ���ģ����磬�ٷ�֮10���ٶ���̖�Ȱٷ�֮20���ٶ���̖�o���ٶȿ졣���Ԅӷ�ʽman���Ǹ��յġ��@���������������ڼ�늘O�_·�_�P���w�ܺ͵صġ�2v�ӵ�ƫ��늉�vio������Ӱ�ݔ��ռ�ձȡ�speed��int�������_����rc�e������ȡݔ��pwm��̖��ƽ��ֵ����pwm���^����ݔ�롣�D1���Ԅӷ�ʽ�ĽӾ���
���auto�˛]��pwm��̖(auto�˞����ƽ)���m�_��ʎ��2048���r����ڣ������M��˯�ߠ�B��
3.2�քӷ�ʽ
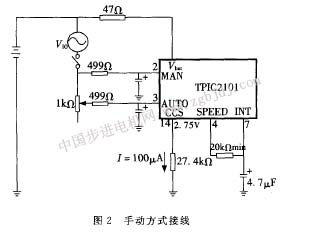
���քӷ�ʽ��һ��man�˵ĸ��ƽݔ��(>5. 5v)��������˯�ߠ�B��׃���\�Р�B�����\�Р�B�У�����ͨ�^2ma�Ĺ������Դ���z�yman��auto������늉���2ma���������һ��o��lk���λ���Ϯa���so��2.2v���λ�
speed��int��������ͨ�V������̎�����֡���man�˵��B�����_·�r�������M��˯�ߠ�B�����⣬������������****2. 2v��Դ늉�ƫ��(v io)���քӷ�ʽ�ĽӾ���D2��ʾ��
���Ԅӷ�ʽһ�ӣ����������{��gd�˵�ݔ��pwm��̖��ռ�ձȣ�ʹ�Դ늉�(vb��)׃���r������Ч늙C늉��鳣�����քӷ�ʽ��ݔ��ݔ���Pϵ��ʽ���£�
4������B�����o����
4.1������B
tpic2101�ɹ�����˯�ߡ��\�к��Ϡ�B�����Ԅӷ�ʽ�����á����ٶ�ݔ�롱��ʼ��˯�ߠ�B�����քӷ�ʽ��auto��man�ˡ��_·����ʼ��˯�ߠ�B���ڹ�����r�£�����Ҳ̎��˯�ߠ�B����˯�ߠ�B���T�Ӷ�(gd)���֞���ƽ�������������������С��200t_a���κ�һ������ġ��ٶȽo������ʼ���\�Р�B��Ҳ������������������B���H�������z�y���^����������ϕr�M����Ϡ�B�����^�� |