һ�N�o�˙C��С���p���늄��ŷ���C���OӋ
���۾꣬������
���Ͼ����պ����W���Ͼ�210016��
ժҪ���S���o�˙C�ɿ���Ҫ�����ߣ����ٿv�o�˙C�����С�Ͷ�C�Ŀɿ��Ե�Ҫ��Ҳ��څ����������OӋ��һ�N�o�˙C�õ�С���p���늄��ŷ���C��ԓ�p���늄��ŷ���C�������p늙C�ӣ��p����Ԫ�����p��Ԫ�������^�����،��F������\�С����⣬�錍�F�p��ȶ�Cϵ�y���ھ��ӑB�z�y�������p��ȶ�C���֞�����M����������ͬ�M�����ԣ��x�ò���ģ�ͱ��^�O�ػ���^��ͨ��ݔ���ķ�������ϵ�y�Ĺ����ԙz�y( bit)ģ�K�����ڲ������p��ȷ�����ԓ��C���΄տɿ����c����ȵ�ͬ�C������@��ߣ������ڿɿ���Ҫ���^�ߵğo�˙C�С�
�P�I�~���p��ȶ�C���o�˙C���ɿ��ԣ������\��
�ЈD���̖��tm383.4; tm307 +.1 �īI��־�a��a ���¾�̖��1001-6848{2010)03-0024-04
0����
늄��ŷ���C���҇��������϶�N�w�C�϶���ʹ�ã����ڬF���o�˙C�ϵđ����Ȟ�V����������늚⡢��ӡ��Cе�������M�ɵĆ����ŷ�ϵ�y�Ŀɿ��ԣ��ڮ����Ԫ�����cϵ�y���ϵļ��gˮƽ�l���£��Пo��ͬ���y���Һ�ٿvϵ�y��ȡ������κ�ϵ�y���ԣ����Ͽ��ǿ��^���ڵģ��mȻ��ͨ
�^���ϵ�y���M��Ԫ�����|�����ӏ���Ԫ���ı��o�����������OӋ�ȴ�ʩ�����ϵ�y�Ŀɿ��ԣ�����Ҫ�����ܴ�Ĵ��r�����ɿ��Ե���߅s�����@������ȼ��g�������������͌�Ԫ������Ҫ���ͬ�r��Ч���ϵ�y�ɿ���[1,2]����ˣ������OӋ��һ�N�m���ڟo�˙C��С���p���늄Ӷ�C��ԓ��C�߂���ȫ늚��p��ȣ���ͨ�^늚��_�P�ГQ�\�Р�B�����OӋ�оֲ���ȣ�����1000 h�΄տɿ��ȴ���0.9������߀�OӋ�˶�C��ȹ���ϵ�y�Լ�����ϵ�y�M���������ԵĹ����ԙz�yģ�K������Ч�،�ϵ�y�����M�ж�λ���A�������M�й��ϱ��o��
1�p���늄Ӷ�Cϵ�y
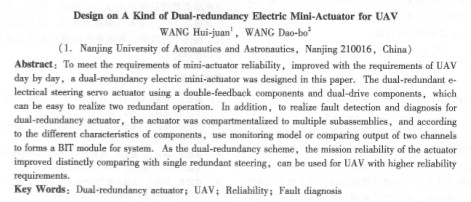
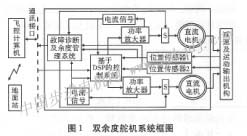
�p���늄Ӷ�Cϵ�y��D1��ʾ����ij��늚�ͨ�����ϕr���ɹ����\�༰��ȹ���ϵ�y��ԓͨ�����x��ʹ��늙C̎���S�Ӡ�B������Ӱ���һ늙C�������@�ӿ��Ա��C��Cijһ늚�ͨ���г��F���ϕr��ϵ�yҲ������������
�����ϵ�y����ԣ���ϵ�y��Ӳ���Y���ϣ������ڿ���ָ����Â�������⣬���ʷŴ�����ֱ��늙C��λ�Â������������˲����ࣻ�ڹ����OӋ�ϣ�ϵ�y��λ���]�h���ƹ����c��ȹ����ܷ��x�����⣬ԓ�p��ȶ�C߀�OӋ�Ђ������ֲ���ȣ��ɱ��C��һ�����������F���ϕr����C�Ծ���һ��������ԡ����ڲ�������ȫ늚��p������ƺ;ֲ���Ș��ͣ�ԓ��C���΄տɿ����c����ȵ�ͬ�C������@��ߡ�������1���г��Ķ�CԪ�����ɿ��ԣ���Ӌ����ζ��·ƽ���o���Ϲ����r�g��4454. 29 h��ϵ�y����1 000 h���΄տɿ��Ȟ�0. 803������ϵ�y���s�����ӣ��p��ȶ�Cƽ���o���Ϲ����r�g����2227. 15 h�����������ϵ�y�R���ɷ����ģ�͡�1��֪���p��ȶ�C1 000 h�΄տɿ��������0.9461���h���چζ��·�Ŀɿ��ԣ��ɝM��߿ɿ��ȟo�˙C����Ҫ��
�@�N�p��ȶ�Cͨ�^늚��_�P���xͨ�����ϣ�����Ҫ�~�������x�������Ƅ���֮ęCе���x�b�ã�ʹ��ԓ��C�����w�eС�������p���Y�����ε����c��������������C�Ŀɿ��ԡ�����ݔ���S��ݔ�����ݔ���S�ęCе�\�Ӻϳɣ��҃�ݔ���S�Г������ز�׃�����ֻҪ���C��ݔ��늙C�D����ͬ�����ɱ��C��늙C�g��ؓ�d���⣬���ܺõؽ�Q���������Ć��}�����@�N��C���ӹ�����Ҫ���^�ߣ����Ү���C������\�Еr�������x��ͨ��늙C�D�ӕ����S��һ늙C�D�ӣ��ஔ�ڶ�C������һ��ؓ�d���@��Ҫ��ֱ��늙C�����^С�ęCе�T������ˣ��@�N�p��ȶ�C�m���ڲٿvС���w�C��o�˙C�Ķ��档
2�p��ȶ�C���ŷ�����ϵ�y
�p��ȶ�C��һ�Nλ���S��ϵ�y������λ���]�h���ơ��p��ȶ�C�oĦ�����ɔ_ʮ�����@���������F�����M�������С��F���ڂ��y��ֱ���{���{��ϵ�y�У������ÿ���늉��ϯB�Ӹ��l���Ҳ�ʹ늙C���ԜpСĦ�����ء����Dz�ͬ������B�¶�C�ŷ�ϵ�y����늉�����B�ӵ����Ҳ���ֵ������ͬ��������������l���Ҳ������cǰ�ƣ��B����λ�ƽo����̖�ϣ��� |