ֱ���D�ؿ��Ʋ��Ե��ȅ^���ֺͼ��ּ��g
��־��
(�_�WԺ���㽭�_��318000)
ժҪ������ֱ���D�ؿ���ϵ�y��ֱ�ӿ����D��˼�룬ͨ�^�����yֱ���D�ؿ��Ʋ��Ե��ȅ^�M�������ָ��M�����ڴ˻��A�ό��ȅ^�M�м��֣��õ����M���_�P늉��x����maitab��simulmk�У��õ����Ӵ��܉�E���D��푑�����������ȽY��������Y�������D�غͶ�������}�����^�ͣ����Ӵ��܉�E�����ٶ����^�����ߡ�
0�� ��
ֱ���D�ؿ������^ʸ������֮����F��һ�N�����ܽ���늄әC���Ʋ��ԡ��cʸ�����Ʒ�����ͬ��������ͨ�^�����������朵������g�ӿ����D�أ����nj��D���M��ֱ�ӿ��ơ���������`����D���`���Լ���朿��gλ�ã��x����m�Ŀ��g늉�ʸ���������D�غͶ��Ӵ�朣����ƶ��Ӵ�朵�ƽ�����D�ٶ��Ը�׃��ͨ�ǵĴ�С�����_������늴��D�ص�Ŀ�ģ����D�غʹ�朷քe���Ü��h�������팍�F�����y���ȅ^�����У���һ��늉��������ڃȣ�ʹ��ͬһ��늉�ʸ������ˌ��ڴ�ĺ�С���D�غʹ�ͨ�`��]�ж��^�e�����ҿ��g늉�ʸ�����x��������Ӵ�朷�ֵ�ʹ�ͨ��ͬ�r׃��������ͨ�����ᗉ�����@����׃��څ����ì�ܵĿ��g늉�ʸ�����Ķ�ʹ����Ŀ�˲����_���������ܲ����_��****�������ڌ����y�ȅ^���ֺͿ��g늉��x��Ļ��A�ϣ������׃�ȅ^���ַ������ȅ^���ֵ�ֱ���D�ؿ��Ʒ�������Ҫ��늉��_�P���M�и��M��ͨ�^���挍���Cԓ��������Ч�ԡ�
1��׃��ݔ��늉�ģ��
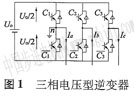
����늉�����׃����D1��ʾ��������늉�����׃������������У�ÿ�l�ױ۵����ɂ��_�P�������_�P��̖�ǻ��a�ġ����x�Ϙ���_�P�����]�ϕr��ci=1��(i=a��b��c)������_�P�����]�ϕr�顰ci=o����
����������Ę�ۿ��Ԙ���8����ͬ���_�P��B��������ݔ��8����ͬ��늉����������±�ʾ��ʸ��׃�Q��
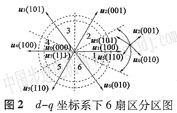
��8�������У���6������늉�ʸ����2����늉�ʸ����늉�ʸ����D2��ʾ��
1��1���Ӵ�朿���
�ڃ��ഹֱd-q�����S�¶��x�Ķ���늉�����(usd��usq)��ݔ��늉�u0��isa,b,c���Q����
�����������isd��isq��
�D�Ӵ����ͬ�����ٶ��؈A��܉�E���D�����ֵ��ؓ�d�Q�������O��������ں��L�Ĺ������ڃȱ��ֲ�׃���t��һ�����ڃ����õ��Б�늙C�Ķ���늉�Ҳ���ֲ�׃�����Ӵ�朿���ͨ�^��ݔ��늉��Ͷ�����艺���IJ�ֵ�M�зe��Ӌ�㣺
���_�P�D�Q���ڃȣ�ÿ��늉�ʸ���dz�����ʽ(4)���ԸČ��飺
ʽ�У���s0���ʼ���Ӵ�ͨ�l��
���H�ϣ���늙C�����\�Р�B�£����Զ�����艺�����У�
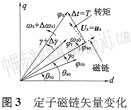
�D3��ʾ��us��u3����r��ʽ(5)�������Ӵ���\��܉�E�c���rʩ�ӵĶ���늉�����׃��ݔ��늉����gʸ��ָ��һ�¡���s0�����_�P����˲�g�ij�ʼ���Ӵ�朚�϶��늉�ʸ��ƽ����Ա��ֳ�6���^�K����D2��ʾ����ÿһ���^�K�У����Եõ���С���_�P�l�ʵăɂ�������늉�ʸ����һ���������Ӷ��Ӵ�朵ķ�ֵ��һ�����Ԝp�ٶ��Ӵ�朵ķ�ֵ�����磺�څ^��1�п����x��늉�ʸ��v4��v3�����ӻ��ߜp�ٶ��Ӵ�朷�ֵ���Դ���ƣ�ͨ�^�x�����_��늉�ʸ������ʹ���Ӵ�朷�ֵ�_���O���ą���ֵ��ͬ��Ҳ�����Á����ֶ��Ӵ�朵ķ�ֵ��늴��D�صķ�ֵ�ڜ��h�ݲ�ȡ�
1��2���Ӵ�机��D��Ӌ��
���Ӵ�朵ķ�ֵ��������ʽӋ�㣺
���Ӵ������ʽ�õ���
|