�����|������plc���ŷ��������ŷ�ϵ�y
���Խܣ������G
(�Ϻ���ͨ��W���Ϻ�200240)
ժҪ����Brһ�N���|������plc���ŷ��������ɵ��ŷ�늙C����ϵ�y��ԓ����ϵ�y���ÿ��gʸ���}���{�ƺ�canopen����ͨ�ţ����C��ϵ�y�ĸ��١��߾��_�ԣ�
o�� ��
�ŷ�ϵ�y��Q�S��ϵ�y�������Ԅӿ���ϵ�y���Á����Ʊ��،����λ�û��D�ǣ�ʹ�����Ԅӵء��B�m�ء����_�؏ͬFݔ��ָ���׃��Ҏ�ɡ��S����ӡ�����댧�w��늙C���켼�g���M�����������ŷ�ϵ�y�ڼ���ӹ����C���ˡ�����܇������Ҏģ�����·�����k���Ԅӻ��O�䡢���_�ȸ߿Ƽ��I���ЏV�����á���ˣ��_չ�ŷ�ϵ�y���о����ЬF�����x��
1�ŷ�ϵ�y�M��
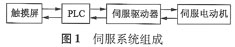
ϵ�y��Ҫ���|������plc���ŷ�����������ͬ���ŷ�늄әC�M�ɣ���D1��ʾ�������ŷ�늄әC���\�ӵĈ��ЙC���������M��λ�á��ٶȺ�������h���ƣ��Ķ��_���Ñ��Ĺ���Ҫ��
ϵ�y����ʩ�͵�늚�������w��Q�������x��xbtgt�|������twido plc��lexiu��1f��5a�ŷ�������bsh늙C������canopen����ͨ�ŷ�ʽ���F�ˌ�늙C�Ŀ��ƺͱO�y��
(1)xbtgt�|������ʩ�͵µ�xbtct2330����rs232c��rs485ͨӍ�ڣ�����m0dbusrtu����վ�f�h����ԺͶ�ҏS�̵�plcͨ�ţ������ԏ��������˙C���棬�܉��Ñ����������ҿ��Է�ӳϵ�y���\�Р�B��
(2)twido plc��ʩ�͵��Ƴ���twido plc�������x��twdlcae40drfһ�w�Ϳ����������ж�Nͨ�ŷ�ʽ�������B��һ��can0pen�F�������ӿ�ģ�K���ڴ�������λ�C����Ҫ���ڿ��Ʒ�ʽ���x��λ���ٶȵȵĽo�����Լ���̖˲�rֵ���xȡ��
(3)lexium05a����������һ�Nͨ���ͽ����ŷ����������ж����ӿڣ��B��canopen��ģ�M���������ӿڵ�cnl���B��늙Cλ�þ��a����cn2�ڣ�24vpf��lv����ϵ�y�Դ�ӿ�cn3���B��pc���ֲ�ʽ�����K�ˡ�m0dbus��canopen��cn4�ȣ���Է����ͨ�^������|���c���a�������·��plc�B�ӡ��x��le x-um05adlom2���Ȳ�����оƬ��ti��˾�ĵ��ġ����ٸ߾��ȵ�tms320v2812�����Æ���200��240 v��늣����ʷ�����o.75 kw��
(4)bsh�ŷ�늄әC���߄ӑB푑����͑T����ˮ��ͬ���ŷ�늄әC���~���D�ٞ�6000 r��min���~���D�؞�o.46��28.2 n��m��ƥ���˸߷ֱ���(17λ)�������Ҿ��a�����m���ڸ߄ӑB푑��߾��ȵĈ��ϡ�늙C��̖��bsh0701p01a1 a,���a����****sincos��Ȧ(13l 072�c��Ȧ)��
2�ŷ��������OӋ
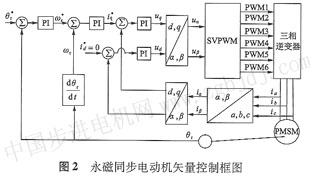
��ϵ�y������ě]����ŷ�������ϵ�y�Ŀ��ƺ��ġ���������Ӳ���x��֪��������оƬ��tms320f2812�����ƌ�����b�������Ҿ��a��������ͬ��늄әC��������B����ͬ���ŷ�늄әC�Ŀ��Ʒ������ŷ�����ϵ�y��Ӳ�����F. 2 l����ͬ��늄әC�Ŀ��gʸ������
����ͬ��늄әC���Џ���ϡ��߶ȷǾ��ԵĽY�������^����׃�Q����id=0�r��tem=pn��fiq=pn��fis,��ͨ�^����iq�Ϳ��Ծ��Եؿ���늴��D�ء��D2������ͬ��늄әC��ʸ������ԭ����D������Ҫ��λ�á��ٶȺ��D�ص����h�M�п��ƣ������^�̞飺λ�ýo���c�z�y����λ����̖����^�����^λ���{������ݔ�������ٶȵĽo��ֵ���ٶȽo��ֵ�cλ����̖�ֵõ����ٶ���̖�M�б��^��ͨ�^�ٶ��{����ݔ��g�S����o����̖iq��d�S����o����̖��0��d�S��q�S�����������̖������׃�Q�õ�������o���c������������IJ�ֵ���^����{����ݔ��늉�ud��uq���ٽ�park��׃�Q�õ�u����u�£����^svpwm�{��ݔ��6·pwm������׃���a���l�ʿ�׃�������������ݔ��늙C��
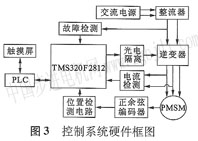
2��2����ϵ�y��Ӳ�����F
��tms320f2812������оƬ�Ŀ����·������ϵ�y�ĺ��ģ�����Ҫ���늙Cλ�õęz�y����������ęz�y�����N���ϵ�̎����svpwm�Č��F�Լ��c��λ�C֮�g��ͨ�ţ�����ϵ�yӲ����D��D3��ʾ��
2��2��1λ����̖�ęz�y
ϵ�y�в��������Ҿ��a������λ�÷����b�ã�ͨ�^hiperfce�ӿڂ�ݔ���a����̖����������ͨ����ģ�Mͨ��������ͨ��ͨ�^rs485���пڂ�ݔ�ŷ�늙C�ij�ʼλ�ã����҆���ģ�Mͨ������������̖ |