����fpga�ğoˢֱ��늙C��C�������OӋ
���\�����£��
(�ؑc��Wݔ׃��b�估ϵ�y��ȫ�c�¼��g�������c����ң��ؑc400030)
ժҪ��ᘌ��oˢֱ��늙C���\�����c���������Ԣ���gaоƬ����ĵ�����������S�oˢֱ��늙C��C�ŷ�����ϵ�y������vhdl�Z���OӋ�˸�����Ӳ��ģ�K��mosܛ��̎����������c�Z�Ծ�����ܛ���Ќ��F��ᘌ��oˢֱ��늙C�Ď�ǰ����������ٶȺ�λ�����]�hܛ�������㷨����������ϵ�y�w
�eС���ɿ��Ըߡ��`���ԏ������F��ȫ���ֿ��ơ�ͨ�^�����C�˻���fpgaоƬ�ğoˢֱ��늙C��Cȫ���ֻ������������M�ԡ�
�P�I�~��fi��ga���oˢֱ��늙C���ŷ�ϵ�y��ǰ��
��Ȧ���̖��tm36 +1 �īI��־�a��a ���¾�̖��1001-6848(2010)03-0048-04
0�� ��
��C�ŷ�ϵ�y�Ŀ�����Ŀǰ��Ҫ����ģ�M�������ͻ��چ�Ƭ�C��dsp�Ĕ��ֿ�������ģ�M�������w�e�����������ܸɔ_���y���{ԇ���y�Կ��Ɵoˢֱ��늙C�����䲻�����c��λ�C���ɿ���ϵ�y�����چ�Ƭ�C��dsp�Ĕ��ֿ����������w�eҲ���^�����ڿ��Ƴ����Ҫ�M��߉̎����Ҫ�M�п����㷨̎������˿��������^�L��ʹ��һ�����������y�Կ��ƶ��_늙C�����⣬��Ҳ�����ⲿӲ���OӋ���`��ɿ��Բ��ߵ�ȱ�c��
sopc���g����ܛӲ����Y�ϵķ�ʽ��Ŀ���nj��M���ܴ�����������ϵ�y��һ�Kfpga�Ќ��F��ʹ�����OӋ���·��Ҏģ���ɿ��ԡ��w�e�����ܡ�����ָ�ˡ��������ڡ��_�l�ɱ����aƷ�S�o����Ӳ�������ȶ�挍�F****�������IJ���altera��˾��оƬ����ƺ��ģ�����sopc˼�룬����Ӳ�����F߉̎����ܛ��̎�������F�㷨�������_������ğoˢֱ����C�����OӋ�Ŀ���ϵ�y�w�eС�������p���ɿ��Ը��Լ������ٶȿ죬��ͨ�^�����C�����P����ָ�ˡ�
1�oˢֱ��늙C�Ŀ��Ʋ���
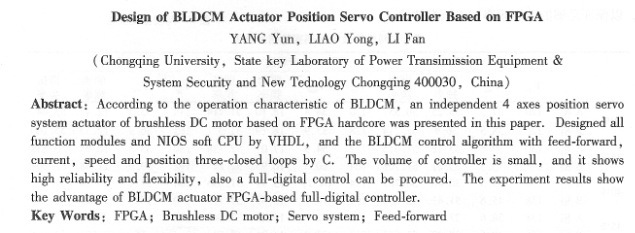
�ڂ��y��늙C�ŷ��������hϵ�y�У���늉�������λ�Cͨ�^ͨ�ŷ�ʽ���o��λ�ýo���cλ�÷�����̖o����^λ��pid�{���õ��ٶȽo��vg���c�y�õ��ٶȷ���v����^�ٶ�pid�{���õ�����o��t��t�c�˕r��ͨ�����෴���������^���pid�{���õ�늉��o��u���ô�ugݔ���{��ռ�ձȣ��Ķ��_��늙C���ŷ�����[4,5]�����Ǵ˷����е�ռ�ձ��{����Ҫ���h�{�����������ã��ӑB푑��ٶ��^�������OӋ�ڂ��y�ķ����м���ǰ���������ٶȽo����ǰ���{���õ���늄�e�����cu��ӵõ�ݔ������D1��ʾ��ǰ�����@�����ϵ�y�ĄӑB푑��ٶȡ�
2ϵ�yӲ���OӋ
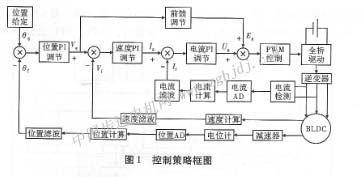
���˱M���pСϵ�y�w�e�ͳɱ���������оƬfpga����altera��˾��cycloneϵ����������������ɲɘ�����ir2175оƬ�M�ɡ�λ�Ùz�y���λ�����F����̖��rc�V������ad7863��ģ�M��̖�D�Q�ɔ�����̖������λ�÷��������˜p������̖�еĸɔ_����������̖���V����ʩ�����|�l�����κ�ݔ��cpu�������ٶȷ����͓Q����̖������Ӳ��߀��������ͨ���·rs232(422)��ir2101�ӣ�mosfetȫ���·������惦��epcs4�������惦��eeprom�ȡ���D2��ʾ��
3 fpga��ϵ�y�OӋ
��fpga�M��늙C���ƣ����Բ��ü�Ӳ���·��������M�п��ƻ�Ƭ��̎�������ü�ܛ����ʽ���ơ����ü�Ӳ���·���Ԍ��F���п��ƣ������ٶȿ죬�ɿ��Ըߣ������@��ռ��ϵ�y�YԴ̫����ͨfpga���YԴ�y�ԝM����ƶ��_늙C�����y�Ԍ��F���s�㷨�����ü�ܛ����ʽ���sӲ���YԴ�s�y�l�]fpga�IJ���̎�������������ٶ�������ϵ�y����Ӳ������ģ�K�c����ܛ�ˌ��FܛӲ����Y��ķ�ʽ����ܛ�˞���ƺ��ģ�Ӳ��ģ�K������������ܛ����Ҫ����ֵ�r��ȥ�xȡ����ݔ������ֵ���@�Ӽ�ʹ�����^�ٵ�߉�T���F���^��Ŀ����ٶȣ�Ӳ��ģ�K����vhdl��verilog |