����ģ��pi���Ƶ�pmsmλ���ŷ�ϵ�y(t��ng)����
���裬�R���䣬������
���������I(y��)��W�Ԅӻ��WԺ������710072��
ժҪ�������ڷ���������ͬ��늙C(pmsm)��(sh��)�Wģ�͵Ļ��A�ϣ���matlab��simulink�h(hu��n)����(g��u)�����[�Oʽ����ͬ��늙Cλ���ŷ�ϵ�y(t��ng)�ķ���ģ�͡�����ϵ�y(t��ng)���ý�(j��ng)������]�h(hu��n)�Y(ji��)��(g��u)����������h(hu��n)����i=0��ʸ�����Ʋ��ԣ��ٶȭh(hu��n)����pi���ƣ�λ�íh(hu��n)����ģ��pi���m�����ƣ����m������ͨ�^matlabܛ�����̡����нo����ϵ�y(t��ng)��ģ�K����ģ�͵Ľ�����������ᘌ�����ϵ�y(t��ng)���H����(sh��)���M����ؓ�dͻ��ͻж�rλ�á��ٶȺ��D(zhu��n)��˲�B(t��i)�^�̷����c�������Y(ji��)��������ԓϵ�y(t��ng)���ɔ_�Ժã��ܿ��ٜʴ_�ظ�ۙλ�ü��D(zhu��n)�ٽo����
�P�I�~������ͬ��늙C��ʸ�����ƣ�ģ�����ƣ���ģ������
�Ї����̖��tm351��tm341 �īI��־�a��a ���¾�̖��i001-6848(2010)-03-0052-04
0�� ��
����ͬ��늙C( pmsm)����и�Ч�ʡ��߿��ƾ��ȡ����D(zhu��n)���ܶȡ����V���{(di��o)�ٷ����Լ����õ��D(zhu��n)��ƽ��(w��n)�Ե�һϵ�Ѓ�(y��u)�c���ڽ����ŷ�����ϵ�y(t��ng)��ռ����Ҫ�ĵ�λ��������S��ϡ�����Ų��ϡ������Ӽ��g���C���g��ʸ�����Ƽ��g�İl(f��)չ������ͬ��늙C�ڇ��������I(y��)�����õĸ����I��õ���Խ��Խ�V���đ��ã��������ʡ���(sh��)�ؙC����늄���܇����ݵȡ�����ͬ��늙Cʸ�����Ƶď��s�Ժ��^�ߵijɱ������Խ�������ͬ��늙C�ķ���ģ�ͣ���늙C���ܺ�ϵ�y(t��ng)���ƅ���(sh��)���о�������Ҫ�����x��
ᘌ�ij���Hϵ�y(t��ng)����(sh��)��������pmsm���D(zhu��n)�����ӡ�ͻ��ͻжؓ�d����r���Y(ji��)��������ԓ�ŷ�ϵ�y(t��ng)푑��ٶȿ죬��ۙ���ȸߣ������^���Ŀ��ɔ_�ԡ�
1����ͬ��늙C�Ĕ�(sh��)�Wģ��
����������180��ͨ�ģʽ��������������ͬ��늙C�Ĕ�(sh��)�Wģ�͡�늴��D(zhu��n)�ص����ԡ����˱��ڷ������ٶ���
a늙C�����@�M��ȫ���Q���ڶ��Ӄ�(n��i)��������B�m(x��)�ֲ���
b�����D(zhu��n)�ӱ���⻬���o�X��Ч����
c���D(zhu��n)��ÿ����϶�ńӄ��ڿ��g�����ҷֲ���
d���Դ�͡��u�����F�ēp�ġ�
늙C�����D(zhu��n)�ӱ��氲�b( spm)�����w�Y(ji��)��(g��u)늙Cϵ�y(t��ng)��d-q����ϵ�µĔ�(sh��)�Wģ�͞�[3��4]
2����ģ�͵Ľ���
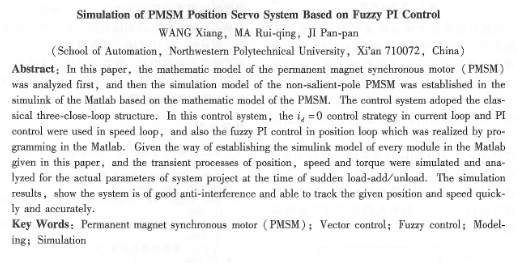
����(j��)pmsm��(sh��)�Wģ�ͣ���simulink�h(hu��n)���н�������ģ��pi���m�����Ƶ�����ͬ��늙C�ŷ�ϵ�y(t��ng)�ķ���ģ����D1��ʾ��
���]�h(hu��n)λ���ŷ�����ϵ�y(t��ng)�У�����h(hu��n)���ÿɿ�����=0���Ʒ����Ɍ��F(xi��n)****�D(zhu��n)�������[5]���ٶȭh(hu��n)������pi���ƣ������^�õ،��F(xi��n)�D(zhu��n)���{(di��o)��(ji��)�����܌������С������Ҫ��ķ�����(n��i)��λ�õľ��_������λ���ŷ�ϵ�y(t��ng)��Ҫ�_������KĿ�ģ�����Ҫ��λ����̖Ҫ�졢�ʡ���(w��n)�ظ�ۙ�o�������˱��Cλ����̖���_������Ҫ��ϵ�y(t��ng)����ģ��pi���m�����ƣ��C�������ܿ��ƺͽ�(j��ng)��pi���Ƶă�(y��u)�c������(j��)���Hλ���c�o��λ�õ��`��`����֣�����ģ��߉�����ķ����팍�r����pi����(sh��)������ʹλ����̖���١��ʴ_����(w��n)���ظ�ۙ�o�����������ϵ�y(t��ng)�������ԡ�
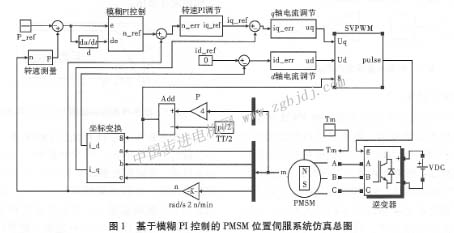
2.1λ��ģ��pi����ģ�K
ģ������ģ�K����simulink��(n��i)Ƕ�Ŀɾ���ģ�K��ͨ�^matlab���́팍�F(xi��n)���@�N���̌��F(xi��n)�cֱ�Ӳ���simulink�ЬF(xi��n)�ɵ�ģ������ģ�K��ȣ��������ɶȴ���ȃ�(y��u)�c����ģ�K��(n��i)��������a�飺
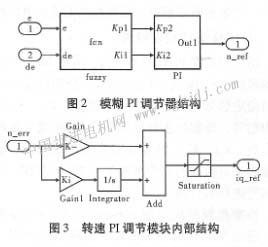
2.2�D(zhu��n)��pi�{(di��o)��(ji��)ģ�K
�D(zhu��n)���{(di��o)��(ji��)������pi���ƣ���D3��ʾ��saturationģ�K������ģ�K����ݔ��ݔ����ģ�K����(sh��)���O��������(n��i)����ȵģ�����ݔ���ֵ���^����(sh��)�O���ķ����r��ݔ���͕�������һ���㶨��ֵ�Ķ��ʬF(xi��n)͠�B(t��i)��saturationģ�Kǰ�����ͨpi���ƣ�����ģ�Kcain�����ϵ��(sh��)��gainl |