����tms320f2812�Į���늙Cʸ������ϵ�y
���У�Մ���ɣ�������
���Ї��ƌWԺ늹��о���������100190��
ժҪ�����y��ʸ�����Ʒ������ڮ���늙C�ķ��Bģ�ͣ�����������늙C�ą���Ӱ푺ܴ����½Y�Ϯ���늙C�����Ժ�Ҫ���ڿ��Ʋ������OӋ���D�٣��������朵ȶ����]�h�������ˌ�������ه�Ժ�С��ƫ��늉����ʽ�����Y��늙C��늉�ģ�ͺ����ģ�͌����y���D�Ӵ��Ӌ���M�����a������������Ч�ؽ��ͅ���׃����ϵ�y��Ӱ푡�dspоƬ��ims320f2812����������\�������̓����������ܣ�����ԓоƬ��Ӳ��ϵ�y�ܺõČ��F�˿��Ʒ�����������ԓ����ϵ�y���ȸߣ����r�Ժ̈́�푑����^�á�
�P�I�~��ƫ��늉����ʸ�����ƣ��D�Ӵ�朣�tms320f2812
�ЈD���̖��tm343; tp273 �īI��־�a��a ���¾�̖��1001-6848(2010)03-0060-04
0�� ��
ʸ�������㷨�д���ʹ����늙C�����������\����늙C����׃���ܴ����D�����****׃�����_50 010���O���Ӱ��˿���ϵ�y���ܡ��������������׃��������������ɵ�Ӱ푳ɞ�ʸ�������е�һ����Ҫ�n�}�����˽�Q�@һ���}���ܶ��W����늙C�����ھ����R�������˴����Ĺ������īI[1-4]��B�ˎN��Ҋ��늙C�����ھ����R��������Ҫ�ДU���������V����( ekf)��ģ�ͅ������m����( mrac)����Ԫ�W�j��(ann)�ȵȣ����@Щ�����㷨���s����Ҫ�������rӋ�㣬���Һܶ���������\��h�������a���\��Y���ġ�ë�̡��F���īI[5]�ڿ��ƭh���м���������]�h���a�����څ���׃��������D�Ӵ���`���������늙C�����ģ�ͣ��ڵ��ٕr�a��Ч�����ѡ�
���ĸ����]�h������׃�����еֿ����ã��ڿ��Ʋ������OӋ���D�٣��������朵ȶ����]�h��늉�����h�������ˌ�늙C�D�Ӆ�����ه�Ժ�С��ƫ����ʽ�����ҽY����늙C��늉�ģ�ͺ����ģ�͌������еĺ���׃�����D�Ӵ�朣��M�����a�����������Ķ��@�^���s�ą������R�h���������늙C����׃��������ϵ�y��Ӱ푡�����dspоƬtms320f2812���F��ԓʸ������ϵ�y��ܛӲ���OӋ��ȡ�����^�õČ��Y����
1 �D�Ӵň�ֱ�Ӷ���ʸ������ԭ��
ʸ�������ж��Ӵň�����϶�ň����D�Ӵň����N�ň�����ʽ���@������D�Ӵň������Ԍ��F������������D�ط����̈́�ń����Ľ��ͨ�^3/2׃�Q�����D׃�Q���Եõ�����늙C�����D����tms320f2812�Į���늙Cʸ������ϵ�y���У����Ӵ�朞�d�S���c֮��ֱ�ҳ�ǰn/2�����g�S�����D�����µĔ��Wģ�͡�
�ڌ��H�����п�������pi�{�������Ķ��@�_����������M����Ч���ơ����w�㷨���£�
����ʽ(1)��ʽ(2)���Կ���d�S��g�S�g������ϡ�Ҫ���������������Ӱ푱�회�d��g�S늉��M�н��Ŀǰ���W�߹�������N��������������ǰ�����ƫ�������IJ���ƫ�����ķ�����ͨ�^����o����̖�c������̖�IJ�ֵ�M��pi�{��������������
��pi�{�����뵽����늉�헵�Ӌ���У����H���C�˸����\�Еrϵ�y���S�o��׃�����{������������푑��o����׃��������Ҫ����늙C�\���У��D�������D��늸е�׃���dz���ƫ�������_���@�ɂ�������������ϵ�y��늙C����׃���ĵֿ�������
2���D�Ӵ��Ӌ���c���Ƶĸı�
��ʸ���������D�Ӵ���ʹň�������գ����nj��Hֵ��Ȼ���@�ɂ��������y��ֱ�Ӝy���ģ����ֻ�ܲ����^�yֵ��ģ��Ӌ�㡣�����y���^�y����������늙Cģ�ͷ�����ه��늙C���������_�ԣ��܅���׃��Ӱ푺ܴ��˽�Q�@�����}�ܶ��W����늙C�����ھ����R�����M���˴������о��������@����y���D�Ӵ��Ӌ��Ϳ����M�и��M�����һ�N�µ��D�ӿ��Ʒ����Ķ��@�^�����ھ����R��ʹϵ�y���\���в��܅���׃����Ӱ푡�
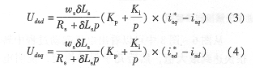
��D1��ʾ��������늙Cģ���У��҂���d�S�c�D�Ӵ����ȫ�غϣ���机��D�،��F��ȫ��������H�\���У�����늙C������׃���g�ӌ����D�Ӵ�� |