���چ�Ƭ�C�IJ��M늙C�����ټ����ȿ����о�
�S���㣬�� ��
���Ϻ���ͨ��W(xu��)���Ϻ�200240��
ժҪ����B�ˆ�Ƭ�C���Ʋ��M늙C��һ��Ӳ���Y(ji��)��(g��u)���ڴ˻��A(ch��)����������N���M늙C���ٵČ��F(xi��n)�������������ˆ�Ƭ�C���r�`����M���Ƶ�Ӱ푣����ó��˽�Q�k����
�P(gu��n)�I�~����Ƭ�C�����M늙C���������������r�`��
�ЈD���̖��tm383. 6 �īI��־�a��a ���¾�̖��1001-6848(2010)03-0095-03
1����ϵ�y(t��ng)Ӳ��
���M늙C�(q��)������ݔ����̖������·���քe�ǣ����M�}�_ݔ����̖cp��늙C�\�D(zhu��n)�������ݔ����̖cw����ͣ��(f��)λݔ����̖rest������ͨ�^��Ƭ�C��i/oݔ�롣��(d��ng)ݔ����̖����(y��ng)�Ć�Ƭ�C���_ݔ�����ƽ�r������(y��ng)�����O�ܹ�����͠�B(t��i)���܉����OС��ݔ����̖����ͨ�^����ʹ�(q��)��������������(d��ng)����(y��ng)���_����ƽ�r�����O�ܹ����ڽ�ֹ�^(q��)���o��̖ݔ�����(q��)��������(y��ng)��P(gu��n)�]���O(sh��)Ӌ�У����ⲿ������̖���Д�Ŀ����£����M�}�_��p2��0����һ�����l�ʰl(f��)����p2.1���ƽ�r���M늙C형r��D(zhu��n)�ӣ����ƽ�r��r��D(zhu��n)�ӣ���p2.2���ƽ�r���M늙C�i�o�����ƽ�r늙C�����Ԯ��D(zhu��n)�ӡ�
2�����l�������䌍�F(xi��n)
��(d��ng)���M늙C��ؓ�d�r���\���l�ʵ��������l�ʕr�����M늙C�����\���l��ֱ�����ӣ�����ԓ�l���B�m(x��)�\�С���Ҫֹͣ�ĕr���ԏ��\���l��ֱ�ӽ������١�����(d��ng)���M늙C���\���l�ʞ�ؓ�d�����l�ʣ���ؓ�d�^��r���׳��F(xi��n)�G������D(zhu��n)�ĬF(xi��n)��ֹͣ�r�l���^�ߣ��׳��F(xi��n)�^�_�ĬF(xi��n)�����λ�þ��Ƚ��͡���ˣ���Ҫ�����M늙C���������l���ƣ���ʹ늙C�Ć����l�ʹ����ߵ��چ����l�ʵ�ij�����m��ֵ����ֵ�cؓ�d�Ͳ��M�(q��)�����P(gu��n)���_ʼ����u���������\���l�ʣ�hȻ���M������\�С����Ľ��l���Կ��������l�����^�̡�
�}�_ͨ�^��Ƭ�C���r�Д�a(ch��n)����ÿ�Д�һ�Σ�p2��0���_�ƽȡ�����Д��ɴήa(ch��n)��һ�����ڵ��}�_���{(di��o)��(ji��)ÿ�ζ��r�������bֵ���Ϳ��Եõ�����(y��ng)�l�ʵIJ��M�}�_��ֱ����ͬ�������lԽ��[4-6]��
����51ϵ�І�Ƭ�C�M�������l���ƕr���O(sh��)��Ƭ�C�ľ����l�ʣ���(j��ng)�^������l�_��Ŀ���l�ʣ��ڵ�n���l�r���l�ʞ�f(n)�����ٕr���l�ʵ��g��ֲ������Ҷ��r�������ڷ�ʽ1���t�˕r���r�����b�d����(sh��)�飺
�O(sh��)���M늙C��f(n)�l�����\�Еr�g������cϵ�y(t��ng)Ҫ�����P(gu��n)�����t�ڴ��H�����\�еIJ���(sh��)�飺
�����_�����_��λ��Ŀ�ģ����̕r�����l��f(n)�ı��֕r�g�Q��鲽��(sh��)����������(sh��)z(n)�M��Ӌ��(sh��)��ÿ��Ӌ�M�r�����r�����b��һ�l�ʵij�ֵ��
�����l������Ҏ(gu��)���Բ�ʧ����ԭ�t�����M늙C���õ������l���Ʒ��������N��
2.1 s����������
s�����Ӝp�ٲ��ý����c���ٌ��Q�������팍�F(xi��n)�����ٿ��ơ���D1��ʾ���ڲ��M늙C�Ӝp�ٵ��^���У�ʹ���M늙C��ÿ�μ��l�ʕr���\����ͬ�IJ���(sh��)z(n)�����ɵõ�s�����������������w���f�����Ը���(j��)ϵ�y(t��ng)Ҫ��Ӌ����Ӝp�ٵ����S�r�g�����Mһ��Ӌ���ÿ�������l�ʵ����S�r�ga���^���õ����l�ʌ���(y��ng)�IJ���(sh��)��
�@�N���ٷ����ă�(y��u)�c�������O�죬���̺��Σ��Ҽ������B�m(x��)׃���ģ��Ķ����������ԛ_���������l�ʲ������ߣ�ÿ�������l�ʵ��\�Еr�gѪ�Dz����pС�ģ����ٶ��Dz�������ġ������ȱ�c��ؓ�d�����^С���ڼ����^�������a(ch��n)��ʧ���F(xi��n)�����Դ˷�ʽ�ڸ��١����d�ɵ���r��(y��ng)���^�V��
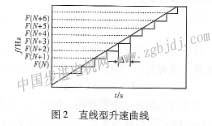
2.2ֱ������������
����ڲ��M늙C�Ӝp�ٵ��^���У����ٶ��Ǻ㶨��׃�ģ��t�õ�ֱ������������������D2��ʾ����ֱ���������������У�늙C���\���l��ÿ�S��һ���_�A����ԓ�l���µ��\�Еr�gat������ͬ�ġ�������(j��)ϵ�y(t��ng)���S�ļӜp�ٕr�g�������õ�at���M���õ�ÿ���l���µIJ���(sh��)z(n)��
 < |