���M��delaunay�ʷ���늄���p�O늙C�ϵđ���
���B�������Ԫ���Y�̏�
���A��������W����WԺ���V��510640��
ժҪ��ᘌ�늄�܇��늄���p�O늙C�\������Ԫ���M��Ӌ��r�������c�Ĵň�������Ҫ����delaunay�㷨�����ø��M�����ǾW�Ԅ������㷨��ʹ���܌������^��������ε����ܺͽǶ�׃���`����M�п��ơ�ͨ�^�ʷ����@ʾ��ԓ���������ɸ��|���ľW���m�����������ѳɹ��ؑ�����܇�����D��늄���p�O늙C������ԪӋ�㣬��ȡ�������õ�Ч����
�P�I�~��늄���p�O늙C�������ʷ֣�������ܣ�����Ƕȣ�����Ԫ
�ЈD���̖��tm341; tm359.9 �īI��־�a��a ���¾�̖��i001-6848( 2010)04-0015-03
0����
늄���p�O늙C(dsem)����20���o90������F��һ�N���͵ęC�һ�w�������{��늙C������ԓ�늙C�İlչ̎�ڄ����A�Σ������D��늄���܇��늄���p�O늙C���о����٣�늙C�OӋ��ʽ���ӣ����N��ͬ��ʽ늙C���ͬ����ˌ�늙C������Ԫ�ʷݼ���Ӌ���@���ɞ���Ҫ��
��������******��ƽ���Π�������ο��Խ���ģ�M�����N���s�Π��ƽ��D����ˣ�������Ԫ��Ԫ�W��Ą����У��������������������Ԫ���Π��delaunay�����΄��ֵ�˼���DZش���һ�N�����΄���ʹ�����������ε���С�Ƚ�֮��****���Ķ�ʹ�Ä��ֵ������β������Fij���Ƚ��^С����r�����^����������Ԫ�ĺ��mӋ�㡣
1���M�����ǾW�Ԅ������㷨���w���F
1.1 delaunaytri��inta��intb)������B
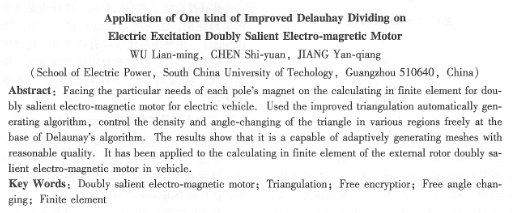
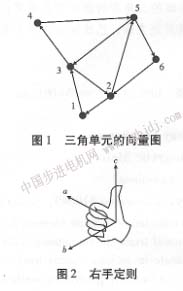
���Ȍ���Ҫ�ʷֵą^���M�в��c�������c��������x����ă��c���c��̖����1��2���������ú���mindistance()����á��Ѵ˃��c�ľ�̖���o����delaunaytri(inta��int b)���˺����Ĺ����nj��ҝM��l���ĵ����c��Ȼ��ѵ����c�ľ�ֵ̖����0��6�քe����ܽ��c��̖1��2�ăɂ�������ʹ�ÿ��g���������Գ��F����W�棬��錤��delaunay�����Εr��ֻ�Ǵ���һ�c����ʼ�K����һ���������D���������F�؏��c���W����D1���F�ځ���ጞ�ʲô�D�������������ǵķ�����һ���������ȰѾ��x����ă��c(1��2)��̖�����γ�һ���g����n��n=��xl - x2��yl -y2���������c����֮�g�ij˷e�֞锵���e�������e�����IJ����������e����e���Ա����x�飺���@��ڱ�ʾ���������ɵĽǶȣ���λ���@�ɂ�ʸ�������x��ƽ���ϡ���c��һ���c���������ɵ�ƽ�洹ֱ�Ć�λʸ������c=axb������c�ķ�����������������t���������ֵ��Ă���ָ��n�Բ����^1800�Ľ��D��6��ȭ�^�r����ĸָ��ָ����ǵ�ָ����D2��
��鱾���ʷ����ڶ�ƽ���M�еģ�����������z�������ֵ��o���O����1��2�c���M�ɣ��ta=��xl - x2��yl - y2��o����������c��3�c���tb=��xl - x3��y1- y3��0������ôc=axb�Ĕ��W���_ʽ��
�������x���Һ�߅�����������ҵ��c�����美̖��3�������˕rҪ�^�m���ҵ�4�c��֪���M��l����ֹ��������е��c�����ܝM��˗l�������f���ڿڵ�����߅�����ڝM��l�����c���˕r��0���麯���ķ���ֵ���أ�����Y�����������ij�c�M�������l���������Д���c�Ƿ�M��delaunay�����Ηl����������M�㣬�t�Д�c�Ƿ�����һ��������ǣ��f���]�НM��ɂ��l�����c������o���鷵��ֵ���أ�����M�㣬�t���c�͞������3�c�����c���Ԙ������Ѕ^���оW���һ�������Ρ��������ε�������c��̖��(1��2��3)�����������c���������нM�ϣ���(1��2��3)��(1��3��2)��(2��1��31��(2��3��1)��(3��1��2)��(3��2��1)���N�M���c֮ǰ�������������c��̖����^�����Ƿ���һ����֮ǰ�����^�ģ�����м��f�����������ѽ��γ��ˣ���3�c��������o���麯��ֵ�ķ���ֵ���أ����һ����ͬ�Ķ��]�У����c3����������c��ֵ������һ�����������������ε�������c����D1�������ҰѾ�̖3���麯���ķ���ֵ���ء�
�ˌ���****�����κ�������Ҫ���c�������������ж�����ÿ�Ό����cֻ��һ���c�����delaunay�����ε��γɿ����Ѓɂ��c���@ |