����magnet��ֱ���_�P(gu��n)����늙C�����о�
�R�c�c���Ϲ�请�
������������W(xu��)늚�W(xu��)Ժ������454003��
ժҪ������magnet�ķ���h(hu��n)����������ֱ���_�P(gu��n)����늙Cϵ�y(t��ng)�ķ���ģ�͡��ڴ˻��A(ch��)�ό�ֱ���_�P(gu��n)����늙C�Ļ��������M(j��n)���˷����о����@���ˌ��Rλ�úͲ����Rλ�õĴň��ֲ����o�B(t��i)늴Ņ���(sh��)�̈́ӑB(t��i)���ܷ���Y(ji��)�������о��˲�ͬ�_ͨλ�ú��P(gu��n)��λ�Ì�늙C�ӑB(t��i)���ܵ�Ӱ푣�����Y(ji��)������ָ��(d��o)ֱ���_�P(gu��n)����늙Cϵ�y(t��ng)���O(sh��)Ӌ���_ͨ���P(gu��n)��λ�Ã�(y��u)����
�P(gu��n)�I�~��ֱ���_�P(gu��n)����늙C��magnetܛ�������S����
�ЈD���̖��tm359.4; tm352 �īI(xi��n)��(bi��o)־�a��a ���¾�̖��1001-6848(2010}04-0024-03
0�� ��
ֱ���_�P(gu��n)����늙C�����Qlsrm������һ�N�����ֱ���\��늙C���c���D(zhu��n)ʽ�_�P(gu��n)����늙C( srm)��ȣ����ஔ(d��ng)�������D(zhu��n)ʽsrm�A�ܷ��������D(zhu��n)��չ�_������(y��ng)�D(zhu��n)�Ӳ��֞�lsrm�μ�������(y��ng)���Ӳ��֞�lsrm������ֱ���_�P(gu��n)����늙C���p�O��׃����늙C����ͬ�r�������D(zhu��n)ʽ�_�P(gu��n)����늙C��ֱ��늙C�ă�(y��u)�c���S���F(xi��n)�������Ӽ��g(sh��)�͔�(sh��)����̖̎�����g(sh��)�İl(f��)չ�����ܵ��˸����e�ǹ��I(y��)�l(f��)�_(d��)���ҵĸ߶���ҕ����������magnet������lsrm���wģ�ͺͺ��ε��(q��)���·�����������M(j��n)�з����о�[3��4]��
1 ϵ�y(t��ng)����ģ�͵Ľ���
1.1����magnet����lsrmģ��
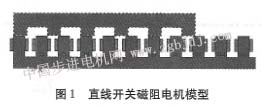
ֱ���_�P(gu��n)����늙C�(q��)��ϵ�y(t��ng)��늙C���w������׃�Q����λ�Â������Ϳ������IJ��ֽM�ɡ�����ֱ���_�P(gu��n)����늙Cģ����D1��ʾ���������L�����̴μ�ֱ��늙C���\�Ӳ��֞�μ������г����O��(sh��)��11�����քe��s1��s2��������si��
1.2�(q��)���·ģ��
lsrm�����_�P(gu��n)��ʽ��늣�Ҫ���F(xi��n)�@�Mͨ늠�B(t��i)���ГQ�������\�б����ه�ڴμ���λ����̖������������ṩ���_�ēQ����Ϣ������magnet�Ԏ���λ���_�P(gu��n)����������ģ�M���ε�λ���_�P(gu��n)�Q�࣬��lsrm�ṩ��_���ʹ늙C��������\�ӡ�
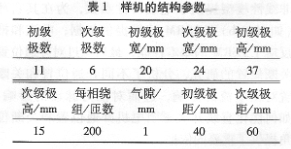
2ϵ�y(t��ng)����Y(ji��)��
�����е�ֱ���_�P(gu��n)����늙C�ĽY(ji��)��(g��u)����(sh��)���l�����x�����O���ľ��ʹμ��O���ľ��غ�λ�Þ錦�Rλ�ã����x�����O���ľ��ʹμ��O�g���ľ��غ�λ�Þ鲻���Rλ�á���(d��ng)����s3s6-s2s5-s7s1o-s3s6-----���������ͨ늕r��늙C���w�S�������\�ӣ���(d��ng)����s2s5-s1s4-s3s6-s2s5s7sl0�������������ͨ늕r��늙C���෴�����\�ӣ���Ҋ�D1����
(1)�o�B(t��i)����
�_�P(gu��n)����늙C����ǹ�ʽ��
ʽ�У� ��������L�ȣ�m������(sh��)��n������O��(sh��)��
��ʽ(1)����Ӌ���������20 mm�������������ͨ�����O(sh��)�_ͨ���P(gu��n)��λ�÷քe��0/20 mm��20 mm/40 mm��40 mm/60 mm�������քe�Ӳ�ͬ�����������magnetܛ���н�����ģ�ͣ����әC���棬���Ժ����õ���D2��ʾ���������Ժʹ�����ԡ�
(2)�ӑB(t��i)����
�_ͨ�Ǻ��P(gu��n)�����lsrm늙C����Ҫ���ƅ���(sh��)����늙C�ĄӑB(t��i)����������Ҫ��Ӱ푡�����׃�_ͨ���c�P(gu��n)��ǣ��ӑB(t��i)��������Ҳ�������@�IJ�ͬ���D4�������\�ӣ�������20 mm���ٶȺ��1m/s���~��늉���30 v늙C���ӕr���������������������朷��沨�Ρ�
(3)�P(gu��n)��λ�Ì������}�ӵ�Ӱ�
늙C�ڻ��������\�Еr��һ����ýǶ�λ�ÿ��ƣ� |