����늙C(j��)ʸ������ϵ�y(t��ng)�����c��(y��ng)��
��ؑ�l(f��)�������壬�f�������������c�A
���A��������W(xu��)�Ԅ�(d��ng)���ƌW(xu��)�c���̌W(xu��)Ժ���V��510640��
ժҪ���o�ٶȂ������Б�(y��ng)늙C(j��)���Ѓr(ji��)��ͺ߿ɿ��Եȃ�(y��u)�c(di��n)����ȡ���ٶȂ������������һ�N����ims320lf2812 dsp�ğoλ�Â���������늙C(j��)ʸ������ϵ�y(t��ng)��������Ҫ��B��ʸ�����ƵĻ������̣�������(j��)�@Щ���̽���ģ�ͅ������m��(y��ng)ϵ�y(t��ng)( mras)����Ӌ(j��)�D(zhu��n)�Ӵ�朣����ͨ�^matlab/simul/nk�����c����dsp�ğo�ٶȂ���������늄�(d��ng)�C(j��)ʸ�����ƌ�(sh��)�(y��n)�M(j��n)�Ќ�(du��)�ȷ������(y��n)�C��ԓ����͌�(sh��)�H늙C(j��)����ϵ�y(t��ng)���{(di��o)ԇ�����������R(sh��)���ȣ��߄�(d��ng)�o�B(t��i)���ܺ߿���Ч����
�P(gu��n)�I�~��ʸ�����ƣ��oλ�Â��������ƣ�ģ�ͅ������m��(y��ng)ϵ�y(t��ng)��matlab/simulink
�ЈD���̖(h��o)��tm343; tp273 +.2 �īI(xi��n)��(bi��o)־�a��a ���¾�̖(h��o)��1001-6848( 2010)04-0030-04
0�� ��
�ڮ���늄�(d��ng)�C(j��)ʸ������ϵ�y(t��ng)����Ҫ�D(zhu��n)����Ϣ�����C�D(zhu��n)�Ӵ�朵Ĝ�(zh��n)�_�����y(t��ng)�Ĝy(c��)ԇ��������늙C(j��)�S�ϰ��b�ٶȂ��������@���H�����˿��ɔ_�Ϳɿ��ԣ�߀����ϵ�y(t��ng)��(f��)�s�Ժͳɱ������m��(y��ng)���ӭh(hu��n)���������S��h(hu��n)����(sh��)�H���b�y(c��)ԇ�O(sh��)��Ҳ�����y�������ֹ����(gu��)��(n��i)��W(xu��)���ѽ�(j��ng)���˴����@������о�������˶�N���͵Ĺ�Ӌ(j��)�㷨����������Ļ���tģ�����m��(y��ng)ϵ�y(t��ng)��(du��)�D(zhu��n)�Ӵ��λ�ù�����㷨�����^�õ،�(sh��)�F(xi��n)ʸ�����Ƅ�(l��)��������D(zhu��n)������Ľ����ͨ�^rms320lf2812 dspϵ�y(t��ng)Ӳ��ƽ�_(t��i)����ֵpc�е�labview��can-usbͨ��ģ�K�M(j��n)���ھ��{(di��o)ԇ���������C�˴���^�y(c��)�Ĝ�(zh��n)�_�ԡ�
1��������늄�(d��ng)�C(j��)��ʸ������
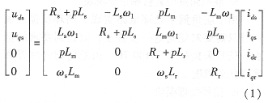
����늄�(d��ng)�C(j��)ʸ�����ƵĻ�����(g��u)����ͨ�^�����ஐ��늄�(d��ng)�C(j��)������ģ���D(zhu��n)�Q��ֱ��늄�(d��ng)�C(j��)��ģʽ��ʹ늄�(d��ng)�C(j��)���D(zhu��n)�ٺʹ�朵Ŀ�����ȫ����ٷքe�����D(zhu��n)����������ʹ�����������ʹ늙C(j��)��늴��D(zhu��n)���c�D(zhu��n)��������������(d��)���ɿ��P(gu��n)ϵ���Ķ��õ��cֱ��늄�(d��ng)�C(j��)����(y��ng)�Ŀ������ԡ�����늙C(j��)�Ĕ�(sh��)�W(xu��)���Ʒ���ʽ���£�늉����̣�
�����D(zhu��n)�Ӵ��?zh��n)������cd�S���غϣ����D(zhu��n)�Ӵ����q�S�ϵķ������㣬�t�˕r(sh��)�Ĵ�朷������£�
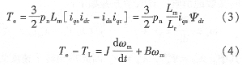
�D(zhu��n)�ط��̺͙C(j��)е���̣�
늉����̺ʹ�朷��̣������ƌ�(d��o)���D(zhu��n)�Ӵ�机��D(zhu��n)��飺
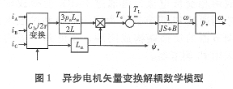
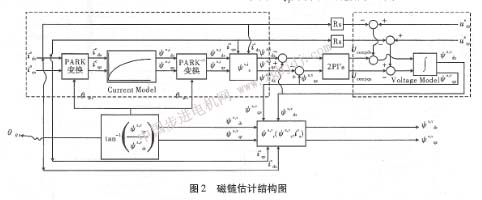
�����湫ʽ�ƌ�(d��o)�ɵî���늙C(j��)ʸ��׃�Q�����(sh��)�W(xu��)ģ����D1��ʾ��
2��朹���ģ�ͅ������m��(y��ng)ϵ�y(t��ng)��mras���c�D(zhu��n)�ٹ�Ӌ(j��)
2.1��朹���ģ�ͅ������m��(y��ng)ϵ�y(t��ng)(mras)
ģ�ͅ������m��(y��ng)ϵ�y(t��ng)�����˃ɂ�(g��)��ͬ�Y(ji��)��(g��u)���ڲ�ͬݔ��׃���¹�Ӌ(j��)��ͬ��B(t��i)׃����ģ�͵����ࡣ�ɂ�(g��)ģ�Ͷ��Dž����o�B(t��i)����ģ�ͣ����ڢ�ģ�ͽY(ji��)��(g��u)��D2����֪ͨ�^�D2���Ϸ���D�ģ����ģ�ͣ�����ģ����õ��D(zhu��n)�Ӵ��?zh��n)������?j��)s�Ϙ�(bi��o)���o�B(t��i)�ā������ģ�͡��͏ĈD2���Ϸ���늉�ģ�ͣ��D(zhu��n)��ģ�͵õ����D(zhu��n)�Ӵ��?zh��n)������?j��)���o�B(t��i)�ā���늉�ģ�͡�
ԓģ�ͽY(ji��)���˃ɂ�(g��)�o�B(t��i)ģ�ͣ���(d��ng)�ڵ��ٵĕr(sh��)������늉�ģ�͵ķ�늄�(d��ng)��(sh��)�dz��ͣ���ʹ�����ٶ��µ��㷴 |