can�����ڽ����ŷ�ϵ�y�еđ����о�
�κ�ϼ
������늙C�о����Ԅӻ����̲�������710077��
ժҪ��can�����ǏV���������xɢ�����I��Ĵ��п���������can��������ͨ�ž���ͻ���Ŀɿ��ԡ����r�Ժ��`���ԣ����������ŷ�ϵ�y������ЙC���ķֲ�ʽ���ƬF���У��õ��V���đ��á�ͨ�^caiv�ŷ�ϵ�y���Ԫ�������ɸ��N�\�ӿ��ơ�ͨ�^can���������ؙC��dsp��sn65hvd230֮�g�Ĕ�����ݔ�c���ƣ�ʹ���ŷ���ʹ�ø����`��ͷ��㣬�ܸ��Ñ����ڸ��N�ֲ�ʽ�Ŀ���ϵ�y�С�
�P�I�~��can������dsp tms320f2407��sn65hvd230;�\�ӿ���ܛ����ͨӍܛ��
�ЈD���̖��tp271 +4 �īI��־�a��a ���¾�̖��1001-6848(2010)04-0085-03
0�� ��
���������Ļ���can�������ŷ�늙C�\�ӿ���ϵ�y�Ǒ��������a�F���ķֲ�ʽ���r����ϵ�y��****�ӵĬF�����cϵ�y��ͨ�^can�����M����������Ă�ݔ���ŷ���ϵ�y������ɸ��N�Č��r�\�ӿ��ơ�ͨ�^can������dsptms320f2407��sn65hvd230�M�Д�����ݔ�c���ƣ�ʹ���ŷ���ʹ�ø����`��ͷ��㣬�ܸ��õđ����ڸ��N�ֲ�ʽ�Ŀ���ϵ�y�С�
1�ŷ�ϵ�ycan�����ĽM��
����can�����f�h��can����������������ؓ�Y������һ����f��can������Ҫ������4�N��Ҋ���ؓ�Y�������������ؓ䡢�h���ؓ䡢�����ؓ�;W���ؓ䡣
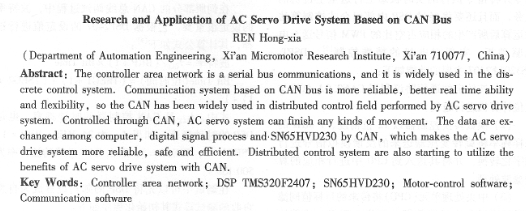
�oՓ�����ķN�ؓ�Y����can�������`���ڿ��ƾW�j�ķ�������ԭ���͌��F�ĽǶȣ�ֻҪ�Ѓɂ�can���c�͌�����ɏ��һ�w��ͨ��ý�w�Ϳɘ���һ��can����ϵ�y��һ�����ε�can����ϵ�y��������λӋ��C���ŷ��������ɣ���D1��ʾ������can�����ϵĹ��c��������Ҫ�^�e��ʽ������ÿ���O��Ҏ����id̖��id̖�����O���ھW�j�е�****���R���������cֻ���շ����Լ�id̖����Ϣ����can�����ĽK��һ����Ѓ�ֻ125�ص��������can��·��ƥ����衣
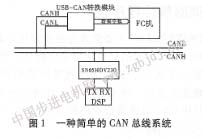
���@����������Ҫ���˃ɂ����c��pc�C��dsptms320f2407��pc�Cͨ�^usb�Dcan�Ľӿ�ģ�K�c�����B�ӣ���dsptms320lf2407ͨ�^sn65hvd230�M��ݔ�롢ݔ���ƽ���D�Q�ccan�����B�ӡ���Ӳ���ĽӿڈD��D2��ʾ��
2�ŷ�늙C��������Ҫ����
�ŷ��Ӳ����Г������Ё�����λ�C�Ŀ���ָ���ָ����еČ��r��B����������λ�C���΄գ�����߀Ҫ�����^dsp�Ȳ��M��ʽ�����㷨���\������a��������ռ�ձȵ�pwm��̖����늙C�Ӱ壬���F��늙C�ľ��ʿ��ơ�dspt-ms320lf2407��Ҫ�Ĺ������£�
(1)���s����ͨ���{�h����can2. oa�����c��λӋ��C�M��ͨ�š�
(2)ģ���D�Q��������12λ���ȡ�1 mhz�IJɘ��l�ʌ����D׃�����́��ķ���ģ�M��̖�M�Д��ֻ��D�Q�����������˵�cpu���M���������㔵�V��̎����
(3)����̎���Ԫ(cpu)��������Ŀ��ֵͬ�V���^�Č��r�Ƕȷ�������һ����˵��M��ʽ�㷨���\�㣬����14λռ�ձȔ�ֵ��
(4) pwm�¼�������������cpu�\��a����ռ�ձȔ�ֵ���Դ˞���������16 khz�l�ʡ�14λ���־��ȵ�pwm��̖��
(5) can�����հl��sn65hvd230оƬ��dsp�Ȳ�ecax��������߉�ƽ�D�Q�������ϵIJ���ƽ��ͨ�^canͨ�ſ��c��λ�C�M��ͨ�š�
(6)ͨ�^6n137���xipmģ�K��pwm��̖�ĸɔ_��
3�ŷ�ܛ�������OӋ
tms320lf2407��Ҫؓ؟��ɳ�ʼ�����������M������̎������ʼ��������i/o�ӿڡ��Ĵ�����̎����������B�Լ��Ȳ�����ģ�K�ȵij�ʼ�����ڳ�ʼ����ɺ����M�˔���̎�����\���ӳ�������can����ͨ�ų����������е�һ���ӳ���Ƕ�������Ƴ���
tms320lf2407�c��λ�C��can2��oa����ͨ�Ų��Ô�������ݔģʽ��can�Ę˜ʔ������ɰ���44��108λ�Ĕ��������ĔUչ�������ɰ���64~ 128λ���������IJ��ؘʎ��M��ͨ�ţ���can2. oa�f�h�� |