����c8051f310��Ƭ�C(j��)��ֱ��늙C(j��)��(sh��)�r(sh��)�D(zhu��n)�ٱO(ji��n)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)
�̇�(gu��)�䣬����r(sh��)��÷����
(����������W(xu��)�C(j��)늹��̌W(xu��)Ժ���M��341000)
ժҪ����Bһ�N����c8051f310��Ƭ�C(j��)��ֱ��늙C(j��)�D(zhu��n)�ٵČ�(sh��)�r(sh��)�O(ji��n)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)�����o��ԓϵ�y(t��ng)��Ӳ���·��ܛ���O(sh��)Ӌ(j��)��ԓϵ�y(t��ng)���нY(ji��)��(g��u)��(ji��n)�Σ����ܿ��ٔU(ku��)չ���{(di��o)���������á��\(y��n)�пɿ������c(di��n)�����ԺܺõرO(ji��n)��늙C(j��)�Č�(sh��)�r(sh��)�D(zhu��n)�١�
�P(gu��n)�I�~������Ƭ�C(j��)��ֱ��늙C(j��)����(sh��)�r(sh��)�D(zhu��n)��
�ЈD���̖(h��o)��tm381��tp273ʮ1 �īI(xi��n)��(bi��o)־�a��a ���¾�̖(h��o)��1001-6848(2010)04
0�� ��
���S��(d��ng)����ϵ�y(t��ng)�У�늙C(j��)�D(zhu��n)�ٵķ����c����ռ�кܴ�ı��أ���(sh��)�F(xi��n)�ٶȷ����ķ�ʽ�c�ֶΣ���(du��)ϵ�y(t��ng)�ķ�(w��n)�B(t��i)�`���(d��ng)�B(t��i)푑�(y��ng)���ܶ�����ʮ����Ҫ��Ӱ푡���(du��)��һ��(g��)�߾��ȵĿ���ϵ�y(t��ng)��
��(w��n)������(zh��n)�_��늙C(j��)�����D(zhu��n)�٣����Ը��õ،�(du��)늙C(j��)�����������������Д�늙C(j��)�\(y��n)�еĮ�����r���M(j��n)�бO(ji��n)�y(c��)����ˣ���(du��)늙C(j��)�D(zhu��n)�ٵĜy(c��)���Ƿdz���Ҫ�ġ�
���y(t��ng)����ģ�M�������ٶȷ�������(sh��)��ϵ�y(t��ng)�������ܷǾ��ԡ��ض�׃����Ԫ���ϻ������ص�Ӱ푣����y�M������^(gu��)�̵Ŀ����Ժ͜�(zh��n)�_��Ҫ��������c8051f310ϵ�І�Ƭ�C(j��)��������늙C(j��)��ģ�M��̖(h��o)���D(zhu��n)�Q���Ԕ�(sh��)����̖(h��o)������ʽ������ٌ���ӳ늙C(j��)�ٶȵ��}�_��̖(h��o)�����o��Ƭ�C(j��)̎������ͨ�^(gu��)led��(sh��)�a�܌�(sh��)�r(sh��)�O(ji��n)��늙C(j��)���D(zhu��n)��[1]��
l ϵ�y(t��ng)�O(sh��)Ӌ(j��)
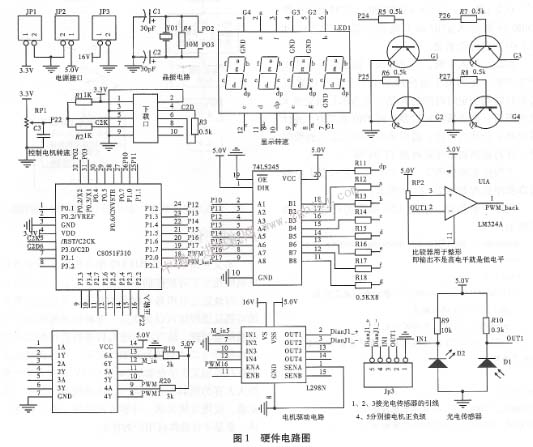
1.1Ӳ���·�O(sh��)Ӌ(j��)
ԓϵ�y(t��ng)������(g��)Ӳ���·�Y(ji��)��(g��u)��Dl��ʾ��
ԓ�·�Ĺ���ԭ�����£�
ͨ�^(gu��)�{(di��o)��(ji��)�λ����(l��i)����늙C(j��)���D(zhu��n)�٣���ͨ�^(gu��)�{(di��o)��(ji��)�λ��rp��׃ݔ�뵽�˿�p2.2��ģ�M늉�����ͨ�^(gu��)c8051f310��Ƭ�C(j��)��(n��i)����a/d�D(zhu��n)�Q�����D(zhu��n)�Q��һ��ռ�ձȵ�pwm��̖(h��o)���Ķ˿�p2.0ݔ����hd74hc04p�M(j��n)�з��࣬������pwm��̖(h��o)���(q��)��(d��ng)������Ȼ����ݔ����늙C(j��)�(q��)��(d��ng)оƬl298��(l��i)����늙C(j��)���D(zhu��n)�٣�֮�������ù�늂������ʹa�P��(l��i)�ɼ�늙C(j��)�D(zhu��n)��(d��ng)�r(sh��)�a(ch��n)�����}�_��̖(h��o)����ԓ�������B�m(x��)��ģ�M��̖(h��o)����Ƭ�C(j��)����̎�������ٌ�4�\(y��n)�ż����·lm324�ӳɱ��^���Ĺ��ܣ�Ȼ���@�M�}�_����ݔ����lm324��2�_����ͨ�^(gu��)�{(di��o)��(ji��)�λ��rp2���Ϳ��Եõ�һ�M��Ƭ�C(j��)����̎���ġ����ܷ�ӳ늙C(j��)�D(zhu��n)�ٵķ�����̖(h��o)pwm_ back���ٌ�pwm_backݔ�뵽�˿�p2.1�������ö��r(sh��)��0��Ӌ(j��)��(sh��)���ܡ���(l��i)Ӌ(j��)��˿�p2.1�ڲɘ�����t��(n��i)���}�_��(g��)��(sh��)�������ͨ�^(gu��)��ʽ(1)�����늙C(j��)���D(zhu��n)�ٲ�ͨ�^(gu��)l��(sh��)�a�܌�(sh��)�r(sh��)���@ʾ����(l��i)��
 ���O(sh��)��t�r(sh��)�g��(n��i)�����r(sh��)��0Ӌ(j��)��(sh��)�õ�m��(g��)�}�_��(sh��)���a�P�D(zhu��n)һȦ�a(ch��n)��һ��(g��)�}�_������������늙C(j��)�ǎ��Џ�(qi��ng)�p���b�õģ��O(sh��)늙C(j��)ÿ�D(zhu��n)һȦ���a�P��(hu��)�D(zhu��n)yȦ���t늙C(j��)���D(zhu��n)�ٞ飺
n=60m/xyt��1��
�������O(sh��)Ӌ(j��)���·���õ�늙C(j��)���~��늉���16 v����?gu��)��Џ?qi��ng)�p���b�õģ�ԓ늙C(j��)ÿ�D(zhu��n)һȦ���a�P��(hu��)�D(zhu��n)64Ȧ���a�P�D(zhu��n)һȦ��(hu��)�a(ch��n)��30��(g��)�}�_������늙C(j��)�D(zhu��n)һ��(gu��)��(hu��)�a(ch��n)��xy= 1920��(g��)�}�_���ұ����ԱO(ji��n)��늙C(j��)�Ć����D(zhu��n)��(d��ng)���о���(du��)����Ҫ�y(c��)��늙C(j��)���p���D(zhu��n)��(d��ng)��ֻҪ����׃�����Ӳ���·������ij����O(sh��)Ӌ(j��)���漴�ɡ�
1.2ܛ���O(sh��)Ӌ(j��)
ÿ��a/d�D(zhu��n)�Q�Y(ji��)���Ĵ���adcoh��adcol�б���adc�D(zhu��n)�Q�Y(ji��)���ĸ��ֹ�(ji��)�͵��ֹ�(ji��)����adoustλ��1��ʹ�D(zhu��n)�Q����D(zhu��n)�Q��(sh��)��(j��)�ڼĴ�����(du��)adcoh: adcol������(du��)�R�ķ�ʽ���档��(d��ng)�����چζ˷�ʽ�r(sh��)�����D(zhu��n)�Q��ģ�M늉������飺o-vref 1023/1024������vref=3.3 v��Ȼ���ٌ������ڼĴ���adcoh�еĔ�(sh��)��(j��)�x�opca��16λӋ(j��)��(sh��)�������r(sh��)���ĸ��ֹ�(ji��)pcaoh����ͨ�^(gu��)�������^ģ�K�ĸ��ֹ�(ji��)pcaocpho��(l��i)�@��һ����ռ�ձ�pwm���������ö��r(sh��)��l�Ķ��r(sh��)���܁�(l��i)�a(ch��n)���Д࣬���O(sh��)���r(sh��)�r(sh��)�g��t�������ö��r(sh��)��0��Ӌ(j��)��(sh��)���܁�(l��i)Ӌ(j��)���ⲿ늙C(j��)�a�P�a(ch��n)���ķ�����(sh��)����Ӌ(j��)����t�r(sh��)�g��(n��i)����(l��i)�Զ˿�p2.1��pwm-back��̖(h��o)���}�_��(sh��)������Ӌ(j��)��(sh��)�Y(ji��)�������ڸ��ֹ�(ji��)tho�͵��ֹ�(ji��)tlo�У���Ӌ(j��)���}�_�Δ�(sh��)�ķ����飺o~ 65535��(g��)��
�ڴˣ������Д࣬��(d��ng)���r(sh��)��l����r(sh��)����Ƭ�C(j��)�a(ch��n)���Д࣬���r(sh��)��1�����(bi��o)־tf1��(hu��)���Ԅ�(d��ng)��o����ȡ�ӕr(sh��)�g�鶨�r(sh��)�r(sh��)�g��k�����t��(d��ng)��Ƭ�C(j��)���k���Д����ȥ�xȡ���r(sh��)��0��tho��tlo����Ӌ(j��)��늙C(j��)1��犵��D(zhu��n)�٣����늙C(j��)�D(zhu��n)���@ʾ����(sh��)�a�ܣ��������³�ʼ�����r(sh��)��tl��to[3]��
|