̫�ۙϵ�y(t��ng)���������OӋ�c����
�������R���£� ꐇ�ƽ��������
���Ϻ�������W늚��ϵ���Ϻ�200093��
ժҪ�������̫��ܰ����������Ч�ʣ��OӋ��һ�N�չⴹֱۙϵ�y(t��ng)��늙C���Ʒ�����ԓ�����c���y(t��ng)��ʹ�Æ�Ƭ�C���ƵIJ��M늙C����ϵ�y(t��ng)��ͬ��������fpca���F(xi��n)�����M늙C�Ŀ��ơ�����(j��)���M늙C���\�D(zhu��n)���c���OӋ�˲��M늙C�����㷨���\��ֱ�Ӕ�(sh��)��ʽ�l�ʺϳ���( dds)���g(sh��)�����F(xi��n)�ˌ����M늙C�ڸ��N�\��ģʽ�¼Ӝp�١������D(zhu��n)�����_��λ�Ŀ��Ʒ��棬�����ܷ�(w��n)���ɿ���ͬ�r������fpca�ṩ�Ŀ������YԴ���ڑ����У�������ͬһ�KfpcaоƬ�����_늙C�M�п��ƣ��Ķ�����Ƚ�����l(f��)늵ijɱ�������fpca�팍�F(xi��n)��̫�ۙϵ�y(t��ng)����Ч���̫ꖰ�Ĺ���D(zhu��n)��Ч�ʣ��������^�V���đ���ǰ����
�P(gu��n)�I�~��̫�ۙϵ�y(t��ng)�����M늙C����늙C����
�ЈD���̖��tm383.6�īI���R�a��a���¾�̖��1673-6540(2010)03-0022-04
0 �� ��
̫�ۙϵ�y(t��ng)��ͨ�^�ɽM��늂��������|�����ϱ���һ�M�����ص�늉�����̖��(j��ng)�^̎�����ķ�����Ӌ�㣬������̎����ݔ������̖�팦늙C�M�п��ƣ��Ķ�ʹ늙C�������{(di��o)����ʹ̫���늳ذ��܉����ӽ��ڰ���������D(zhu��n)�팦̫��M��ۙ��ʹ̫���늳ذ��܉����ؽ���̫ꖹ�ݗ�䣬���F(xi��n)��̫��ܸ��ӳ�ֵ��������á�
��̫ꖴ�ֱ�䵽̫���늳ذ��ϕr��늳ذ����յĹ��ս���****�����ǣ����y(t��ng)��̫��ܰl(f��)��b���nj�̫���늳ذ�̶����A�������õ�֧���ϣ�̫���늳ذ�ֻ������һ������ʹ̫��ܵ������ʴ�͡����b�ڴˣ��о��OӋ�����������õ�̫�ۙ�l(f��)�ϵ�y(t��ng)�����OӋ�����b�ã����˱���ܳ��d̫�늳���壬ҲҪ������ڿ��g�����ӽ�����������w�D(zhu��n)�ӣ���˲�����ȫۙ����̫�������е�λ�ã��Ķ�����ʹ���w�l(f��)����õ���ߡ���ϵ�y(t��ng)����������������ܶȣ�ȡ�ù��յ�****�����Լ�����ͬ�İl(f��)�����ʹ���^�ٵ�̫�늳��Խ��Ͱl(f��)늳ɱ������****�о��l(f��)չǰ����
1 ۙϵ�y(t��ng)�Ŀ�ܼ����M늙C�Ŀ���ԭ��
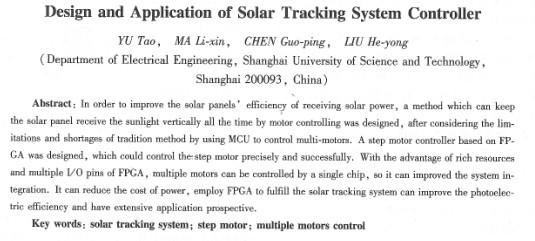
ԓϵ�y(t��ng)���OӋ����ϵ�y(t��ng)�ܘ�(g��u)��ʹ�Ã��_���M늙C�����(q��)��Դ���OӋ�����������õ�̫�ۙ�b�ã��˙C��(g��u)�������ӽ����������w�D(zhu��n)�ӵ�̫��ܰl(f��)�ϵ�y(t��ng)��ϵ�y(t��ng)��D��D1��ʾ��
ϵ�y(t��ng)�У������F(xi��n)�����****Ч�ʵ����ã��P(gu��n)�I�nj����M늙C�ľ��_���ƣ��Ķ��_����̫ꖵĜʴ_ۙ������̫���ۙϵ�y(t��ng)Ҫ���ӽ���������w�D(zhu��n)�ӣ���˲��M늙C�ڲ�ͬ�ĕr����Ҫ�����D(zhu��n)���D(zhu��n)�\�ӣ��������ں��y������̫ꖵČ��rۙ���@����õ����gЪʽۙ������늂��������ص�늉���ֵ�_��һ��ֵ�r늙C���M���ˑB(t��i)�{(di��o)����ʹ늙C����λ�\�С���ˣ�����̫���ۙϵ�y(t��ng)����Ҫ�M�ɲ��֣�������Ҫ�������ಽ�M늙C�Ŀ���ϵ�y(t��ng)��
��Ŀǰ�đ����У����M늙C�Ŀ��ƺ��(q��)�Ӵ����Æ�Ƭ�C����1�K�(q��)��оƬ�팍�F(xi��n)���������چ�Ƭ�C�����YԴ�����ƣ�һƬ��Ƭ�C�܉���Ƶ�늙C��(sh��)Ŀ���ޣ����⿼�]��δ��̫��ܰl(f��)늈���Ҏ(gu��)ģ�����˱M���ܵؽ��Ͱl(f��)늳ɱ����б�Ҫ��һ�KоƬͬ�r�����_늙C�M�п��ƣ�����x��fpca�팍�F(xi��n)��늙C�Ŀ��ơ�
ϵ�y(t��ng)�У��漰�����_���M늙C�����]�����_늙C�Ŀ��ƙC������ͬ�ģ����OӋһ�_늙C�Ŀ���ϵ�y(t��ng)����һ�_늙C�Ŀ���ϵ�y(t��ng)����ֱ����fpga��ӳ�䌍�F(xi��n).
2���M늙C����ϵ�y(t��ng)�OӋ�c�������
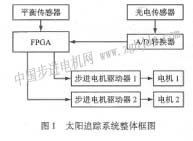
ϵ�y(t��ng)�OӋ�У���fpca��ʹ��vhdl[6]�Z�Ծ��̌��F(xi��n)���M늙C�ļӜp�١����ֿ��ơ������D(zhu��n)���ƣ��Լ������M늙C�ľ��_��λ���팍�F(xi��n)ϵ�y(t��ng)��̫ꖵĜʴ_ۙ��늙C����ϵ�y(t��ng)��플��·Ҋ�D2��
�D2�У�clk��r���̖������̖��fpga��(n��i)���r���̖���l�@�ã�datain���l�ʿ����֣���׃datain�Ĵ�С�܉��׃���M늙C�����ʣ�dir�鲽�M늙C�D(zhu��n)�������̖��mode�鲽�M늙C�\��ģʽ�x����̖���@�ﲽ�M늙C�������������ġ������p���ġ����������D(zhu��n)�ӣ�dw�鶨λ������̖��d�鶨λ�IJ���(sh��)��outputabe�����ನ��ݔ����
|