ժҪ������m8gnet����h(hu��n)��������(j��)늙C(j��)�ĽY(ji��)��(g��u)����(sh��)������������6/4�O�_�P(gu��n)����늄әC(j��)(srm)��ϵ�y(t��ng)����ģ�͡�ͨ�^����������õ���늙C(j��)�Ĵň��ֲ����o�B(t��i)��������Լ���(w��n)�B(t��i)�\�����ԣ����Ì��H����늙C(j��)�Č��Y(ji��)��������Y(ji��)���M(j��n)������C������Y(ji��)���c���Y(ji��)���ӽ�����C������Ԫ��������Y(ji��)�������_�ԡ�
�ЈD���̖��tm352 �īI(xi��n)��(bi��o)־�a��a ���¾�̖��1001-6848��2010��02-0023-03
�_�P(gu��n)����늙C(j��)�(q��)��ϵ�y(t��ng)( srd)�����_�P(gu��n)����늙C(j��)���w(srm)������׃�Q������������λ�Â������IJ��ֽM�ɡ����ĽY(ji��)��(g��u)���ΈԹ̣��{(di��o)�ٷ��������{(di��o)�������܃�(y��u)���������������{(di��o)�ٷ�����(n��i)�������^�ߵ�Ч�ʣ�ϵ�y(t��ng)�ɿ��Ըߣ��Ǹ����о����_�l(f��)�ğ��c֮һ�������Ю���늄әC(j��)�{(di��o)��ϵ�y(t��ng)��ֱ��늄әC(j��)�{(di��o)��ϵ�y(t��ng)�����c��Ŀǰ�V����(y��ng)����늄�܇�(q��)�ӡ�������������ù��I(y��)�����칤�I(y��)���ŷ�ϵ�y(t��ng)�ȸ����I(l��ng)���Ј��l(f��)չ?ji��)����ܴ�?/div>
�_�P(gu��n)����늄әC(j��)�ň��ֲ���(f��)�s����·������׃�������ڇ�(y��n)�صľֲ�ͣ����O(sh��)Ӌ�����ܷ����c���y(t��ng)늙C(j��)��^���y���õ�Ч��·������늙C(j��)�ň�����������magnet��srm�әC(j��)�Ĵň��ֲ����o�B(t��i)��������輰��(w��n)�B(t��i)�\�������M(j��n)���˷��棬�o����һϵ�Ќ��O(sh��)Ӌ������ϵ�y(t��ng)��һ��ָ��(d��o)���x
1 ϵ�y(t��ng)����ģ�͵Ľ���
1.1 srm늙C(j��)���wģ�͵Ľ���
����magnet����srm�Ķ��S����Ԫģ�ͣ���ģ�^�����£�
(1)�x�����ƽ�棻
(2)�_��늙C(j��)�ĽY(ji��)��(g��u)�ߴ磬���ģ�ͣ�
(3)�_��늙C(j��)�����ֵIJ��ό��ԣ�
(4)�_������d�ɼ��r�g���L�ȡ�
������峵�srm�әC(j��)��������6/4�O�Y(ji��)��(g��u)�����D(zhu��n)�Ӳ��Ͼ���dw310-35���D(zhu��n)�S����10#䓣��әC(j��)�ĽY(ji��)��(g��u)����(sh��)����Ҫ����ָ��(bi��o)���l��ʾ��
����(j��)��1�ĽY(ji��)��(g��u)����(sh��)����magilet�ľ���ģ�����½����Ķ��S��ģ����D1��ʾ��
����ÿ�ی�(d��o)�w��(sh��)48���ɸ�ֱ��0.48 mm��(d��o)�����@��ģ���ж��D(zhu��n)���g�ĈA����϶�֞鶨���oֹ��϶���D(zhu��n)�����D(zhu��n)��϶�ɲ��֡�
1.3����׃�Q���cλ�Ùz�y��ģ
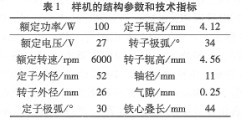
�D3�齨���IJ����Q���Y(ji��)��(g��u)����srd����׃�Q�����·��
��a��������ԓ���Ѓɂ����_�P(gu��n)pcsl��pcs4���m(x��)�����O��dl��d4���������_�P(gu��n)��pcsl��pcs4��ͬ�r��(d��o)ͨ���P(gu��n)��ġ���(d��ng)pcsl��pcs4��(d��o)ͨ�r��dl��d4��ֹ���Դu����a���ɶˣ���(d��ng)pcsl��pcs4�P(gu��n)���r��a���@�M�a(ch��n)������׃����늄ӄݣ��tdl��d4��(d��o)ͨ�����ͨ�^di��d4���������cl�m(x��)�������_�P(gu��n)��magnet��λ���_�P(gu��n)�팍�F(xi��n)��ͨ�^�A(y��)���O(sh��)�ø�λ���_�P(gu��n)�Č�(d��o)ͨ���P(gu��n)��λ�þͿ��Ԟ鹦��׃�Q���ṩ���_�ēQ����Ϣ��
������a���_�P(gu��n)���_ͨ�Ǟ�0�ȣ��P(gu��n)��Ǟ�28�ȣ��_ͨ�P(gu��n)�����ڞ�90�ȡ�b��c�����_�P(gu��n)���_ͨ�Ƿքe�ca�����30�Ⱥ�60�ȣ������ca����ͬ��
2����Ԫ����Y(ji��)��
2.1����Ĵň������ֲܷ�
��srm�ĴŻ������У����Ă��D(zhu��n)��λ�õĴŻ����������P(gu��n)��Ҫ�ġ�һ���@���@�Ă�λ���µĴŻ��}�����t���Կ��ٶ����_�ؔM��������D(zhu��n)��λ���µĴŻ�������Ӌ���srd�ĸ�����ܡ��@�Ă�λ���ǣ��D(zhu��n)�ӘO�g���ľ��c��ŘO���ľ����Rλ�æ�u���D(zhu��n)�ӘOǰ���c��ŘOǰ�،��Rλ�æ�1���D(zhu��n)�ӘOǰ���c��ŘO���ľ����Rλ�æ�hr���D(zhu��n)�ӘO���ľ��c��ŘO���ľ����Rλ�æ�a��