�����_�]�h�����W��λ���{����ֱ���ŷ�ϵ�y
�� ��1���{�ͻ�1�����A��2
��1�|�����I��W늚�̌WԺ���\��1210012�����Ƽ���W��Ϣ���̌WԺ������100083��
ժҪ��ᘌ��ň�����ʸ�������µ�����ֱ��ͬ��늙C�ŷ�ϵ�y������_韭h�����W��λ���{���������F����λ����̖�Ĝʴ_��ۙ���ơ�Ԕ���������_�]�h�����W��λ���{���µ�ֱ���ŷ�ϵ�y�Y���c���Wģ�͡��o��ֱ���ŷ�ϵ�yλ���{�����Y���������z���@�ӵ��_�]�h�����W��λ���{���㷨������λ�ø�ۙ��ͻ��ؓ�d���Y���������_�]�h�����W�����ƾ���ϵ�y푑��ٶȿ죬λ�ø�ۙ�ʴ_�����c��ͬ�r������Ч���C�ܔ_��B�µ��������ܡ�
�P�I�~��ֱ���ŷ����_�]�h�������W����λ���{��
�ЈD���̖��tm351; tm359.4; tm341 �īI��־�a��a ���¾�̖��1001-6848( 2010) 02-0054-04
0�� ��
����ֱ��ͬ��늙C( pmlsm)���ɵ�ֱ���ŷ�ϵ�y���Ԍ��F늙C�c�����_֮�g������ӣ�������Ҫ�κ����g�Cе���әC������ʹϵ�y�ʬF푑��ٶȿ졢Ч���̺�λ�ø�ۙ�ʴ_�����c���@���ڙC�����١��߾��șCе�ӹ��Č��F�����O����Ҫ�����á�pmlsmֱ���ŷ�ϵ�y�������Y���ϵĺ������������������s�������Ҫ���ÿ������܃������������úõ����M���Ƽ��g���練�����Ի��������W�j��������ģ���Ʒ���[2-4]�����з������Ի��������W�j����Ӌ���������s������ģ���Ʒ�����λ�ø�ۙ���Ȳ��ߡ�
�C���ӹ��^���У�ֱ���ŷ�ϵ�y��λ�ÿ��������w�F��һ�N�����������\�ӣ��������W������(ilc)�������m�����@�N�����؏��\�����|�ı���ϵ�y���e�Dz����_�]�h�����W�����ƕr���܉F�����W���ķ���һǰ�����ƹ��ܣ����Ա��C�ڷ�����������悶������£�ʹǰ�����ƿ��ٌ��F��ȫ��ۙ�΄ա���ˣ��������ٶ�lp�{���µĴň�����ʸ�����ƽY������A���ⲿ�����_�]�h�����W����ʽ��λ���{�������������hֱ���ŷ����ƽY�������Cϵ�y�������õ�λ�ø�ۙ���ܼ��������ܡ�
l�_�]�h�����W��ֱ���ŷ�ϵ�y
����ֱ��ͬ��늙C�ň�����ʸ�����ƻ�������ʽ�飺
ʽ�У�id(t)��d�S�����iq(t)��q�S�����kp������ϵ����fe(t)��늴��������˕r��늴�����ֻ�܄������q�S����iq(t)Ӱ푣�ʹ늙C늘������q�S���c��������d�S�����F��ȫ���
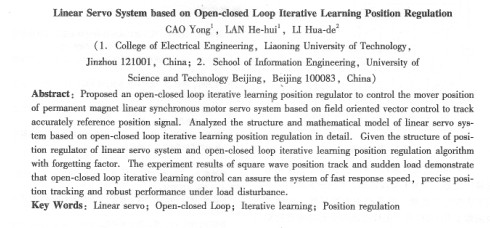
�ň�����ʸ�������µ��_�]�ɵ����W��ֱ���ŷ�ϵ�y��������h���ƽY��������������ƭh���ٶȿ��ƭh��λ�ÿ��ƭh����D1��ʾ��ֱ���ŷ�ϵ�y��pmlsm��igbt��׃����늉����gʸ���}���{����svpwm��abc/dq����׃�Q����dq������׃�Q����λ���{�������ٶ��{����������{������늽Ƕ��ա���̖�������ȽM�ɡ�늙C������������ɻ�������������@�ã�ֱ��λ���ɹ�ū@�á����У�λ���{������p���_�]�h�����W���{���㷨���ٶ��{������ip�{���㷨������{������pi�{���㷨��
ϵ�y�����^�����£�ֱ��λ�Å���ֵdr(t)�c����ֵd(t)�IJ�ֵ����λ���_韭h�����W���{�������õ��ٶȅ���ֵvr(t)��ԓ��̖�c�ٶȷ���ֵv (t)����^������ֵ�����ٶ�ip�{�������õ�q�S�������ֵiqt(f)������ϵ�y����d�S�������idt(t)=o��ʧ�����Ʒ�ʽ������c����abc/dq����׃�Q���ķ������ֵ����^���������pi�{������ͬ�r���^dq/��������׃�Q���õ�ۡ�S����늉�����늉����gʸ���}���{����svpwm����6·igbt����̖���Եõ�pmlsm���������@�M�Ĺ����̖��
����o���ٶ�ip�{���㷨��ʽ����������{��������׃�Q��svpwm�㷨�������죬�@�ﲻ��٘�����ٶ�lp�{���㷨��ʽ���£�
ʽ�У�kap��kai�քe���ٶȱ������e���{�����ӡ�ԓ�{�����Ќ������h���I���Ƶ�����ͨ·�ϣ��䮔�����a�������á�
|