����Y(ji��)�C���Ӽ����\�ӿ����о�
ۭ����f���������壬����
���A��������W(xu��)�Ԅӻ��ƌW(xu��)�c���̌W(xu��)Ժ���V��510640��
ժҪ���������O(sh��)Ӌ������Y(ji��)�C�Ŀp�ƻ��Ӹ�ʽ�������Ӵ惦��ʽ�ͻ��ӿp�Ǝ��ĸ�ʽ����B�˻��ӿp�ƕr���Ñ�����(bi��o)���Cе����(bi��o)���D(zhu��n)�Q�^�̡��ڽY(ji��)�����S�ŷ�늙C�Ͳ��M(j��n)늙C�����ԵĻ��A(ch��)�ϣ�����˲���dsp��uc/os -�������ƽ�_�Ļ��ӿp�ƿ���ϵ�y(t��ng)�Ŀ��Ʒ������о��ɹ�������������Y(ji��)�Cϵ�y(t��ng)�õ���(y��ng)�ú���C�����H��(y��ng)���C����ԓ����ϵ�y(t��ng)�ľ��_�ԡ��ɿ��Ժ͌����ԡ�
�P(gu��n)�I�~������Y(ji��)�C�����Ӹ�ʽ��dsp��uc/os -�����ŷ�늙C�����M(j��n)늙C
�ЈD���̖��tm383.6, tp273 �īI(xi��n)��(bi��o)־�a��a ���¾�̖��1001-6848( 2010) 02-0091-04
0�� ��
�F(xi��n)�����ܿp���O(sh��)���ǏV�������˿p�ƻ������锵(sh��)��(j��)Դ������Ƕ��ʽϵ�y(t��ng)����Ϣ���g(sh��)�����Ϳp���O(sh��)�䣬���ԝM������Ч�����|(zh��)���Ŀp������ԓ��O(sh��)������Ԕ�(sh��)��(j��)�(q��)�ӣ����S�f(xi��)ͬ����C�һ�w�����Ñ����A(y��)���Լ����ܡ����Ի��p�Ƶ����c�����У��p�ƻ����O(sh��)Ӌ�nj��F(xi��n)���ܿp�Ƶ���Ҫ���A(ch��)�Թ���֮һ������Y(ji��)�C��һ�N����p���O(sh��)�䣬�仨�Ӕ�(sh��)��(j��)��ͬ����ӻ��әC�����ļ��������E����(bi��o)��λ�Ƶ�ʸ����Ϣ�ͼ�������ᘡ��Qɫ�ȶ�N�Ŀp�ƿ�����Ϣ�����DZ��^���εĔ�(sh��)��(j��)��Ϣ���������Y(ji��)�C���Ӹ�ʽͨ�������Ç��H���^��������dsb��dst��dsz�Ȼ��Ӹ�ʽ�����Ǹ���(j��)���H���������O(sh��)Ӌ���Ӹ�ʽ�����ؙC��˾�ĸ����Y(ji��)�C��
�����ڷ���������Y(ji��)�C�ęCе�Y(ji��)��(g��u)��늚�ýy(t��ng)���ƵĻ��A(ch��)�ϣ��O(sh��)Ӌ���Y(ji��)�C�Ļ��ӿp�Ǝ��Ĵ惦��ʽ�����ӿp�ƕr�Ñ�����(bi��o)�D(zhu��n)�Q������Y(ji��)�C�ęCе����(bi��o)�ķ���������߿p���^�����ܵĽǶȳ��l(f��)����B��������ͬ���ŷ�늙C�������S�(q��)�ӣ����M(j��n)늙C����x��y�����(q��)�ӣ����Ô�(sh��)����̖̎����dsp��uc/osһ�������ƽ�_�Ļ��ӿp�ƹ���ԭ����
l ���Ӹ�ʽ���O(sh��)Ӌ
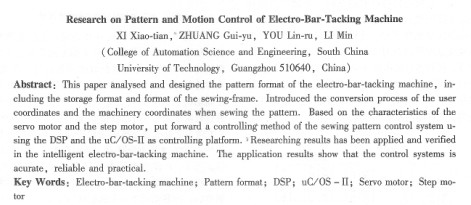
һ����r���ڸ���(j��)�Ñ�Ҫ��ėl���£�����Y(ji��)�C�p���^����ͨ����Ҫ̎��ɷN��ͬ�Ļ��Ӕ�(sh��)��(j��)�����̶����Ӻ��Ñ����ƻ��ӡ��̶�������ᘔ�(sh��)���L���Ȍ����Լ������p�Ǝ���(g��u)�ɡ��Ñ����ƻ������Ñ��ڹ̶����ӵĻ��A(ch��)���M(j��n)�пs�š��M�ϵ��Զ��x�Ļ���������Ϣ���������ɵġ������Ñ����ƻ��Ӷ����ڹ̶����ӵĺ���׃�����γɵģ������Թ̶����Ӟ���A(ch��)���O(sh��)Ӌ����Y(ji��)�C�Ļ��Ӹ�ʽ��ͨ�^������Y(ji��)�C�ĸ��N���ӵķ������̶����Ӹ�ʽ�����ɻ����^�ͻ����w�M�ɡ�
�����^����������Ϣ�У�(1)������̖��(2)���ӿp�Ǝ��Ă���(sh��)��ÿ�����ӵ�ᘔ�(sh��)����(3)���_��̖��Ϣ��(4)���ӵ��L�ȣ�(5)���ӵČ��ȣ�(6)�p���ٶȣ�(7)�����֡�
�����w���ÿ�����ӵ����пp���c������(bi��o)��Ϣ������(bi��o)��Ϣ�M���˻��ӵ������E��
���⣬�Ñ����ƻ��Ӹ�ʽ�w������Ϣ�У�(1)�̶�������̖��(2)�M��s�ű��ʣ�(3)�v��s�ű��ʣ�(4)���_��̖��Ϣ��(5)�����֡�
�p�ƻ��ӿ���ͨ�^�xȡ���ӵ�ַ�õ��������̶����ӵ�Ŀ䛁���Ź̶����ӵ�ַ���̶����Ӱ����˹̻��ڴ惦���л��Ӻ��Ñ��Զ��xԭʼ���ӡ��Ñ����ƻ��ӿ��Ԍ���(y��ng)�κ�һ���̶����Ӻ̶����ӵĽM�ϣ�ͨ�^�Ñ����ƻ��Ӹ�ʽ�w���x����(y��ng)�Ĺ̶�������̖���@���Ñ����ƻ��ӾͿ���ֱ��ͨ�^��̖�xȡ����(y��ng)�Ĺ̶����ӻӽM�ϵ���̖�����ڹ̶�����Ŀ����xȡ���̶����ӵ�ַ���Ñ����ƻ����ڵ�һ��ʹ�ú��Ѷ��ƻ��ӿp�Ǝ��惦�����Թ��´��{(di��o)��ͬ�ӵ��Ñ����ƻ���ʹ�á����ӽY(ji��)��(g��u)��D1��ʾ��
2�����Ñ�����(bi��o)�c�Cе����(bi��o)���D(zhu��n)�Q
����Y(ji��)�C�p�ƻ��ӵ���E�ɻ��ӿp�Ǝ��������p�Ǝ���ƽ��ֱ������(bi��o)ϵҎ(gu��)����һ�����p���c������(bi��o)��Ϣ���@�ǿp�ƻ��ӵĿp���c�����g����(bi��o)��Ҳ�������Ñ�������(bi��o)���Q֮��p���c���Ñ�����(bi��o)���Ñ�����(bi��o)�ǹ̻��ڴ惦���е�ԭʼ����(bi��o)��Ȼ��������Y(ji��)�C��x��yƽ���ϵ��Ͳ��^�����Ƀɂ����M(j��n)늙C��������Y(ji��)�C���Ͳ��C��(g��u)�a(ch��n)���v���M��λ�Ɓ팍�F(xi��n)�ģ���λ������(bi��o)�惦���Dz��M(j��n)늙C���D(zhu��n)�Ƕ�����(bi��o)����O����(bi��o)�������@�Ӿ͟o��ֱ�����Ñ�����(bi��o)���鮔(d��ng)ǰ�p���c���Ƅӵ���һ���p���c��+l����K�p�Ǝ��������Ҫһ���Ñ�����(bi��o)�c�Ͳ��C��(g��u)�ęCе����(bi��o)��һ���D(zhu��n)���^�̡�
|