늄���܇�������D��dspm늙C�о�
�����䣬���Ԫ
���A��������W���V��510640��
ժҪ�����D���p�O����늙C����늄���܇�����S�����ݣ��Ŀ��ƵĽǶȽo���˻���tms320l2407a dsp���Ƶ�dspm�D��λ����̖�z�y�ķ�������ӑՓ��λ���}�_��̖�·�cdsp֮�g�Ľӿچ��}��
�P�I�~��늄���܇�����D���p�O����늙C��tms320lf2407a;λ����̖�z�y
�Ї����̖��tm351��tp273 �īI��־�a��a ���¾�̖��1001һ6848(2010)02-0098-04
o�� ��
�p�O����늙C( dspm)���S��������ӌW����ӌW���w�ٰlչ��90������F��һ�N���Ϳɿؽ����{��ϵ�y����t��a lipo����������������M����ϵ�е���Փ�͌���о����p�O����늙C�Ķ��D�ӽY�������c�_�P����늙C���ƣ����p�O�Y������֮ͬ̎�������Ķ����Ϸ��������w���D�ӟo�@�M�������w���о��C��dspm���п�������ӑB푑��졢�{�����ܺá��D������ȴɌ��F���N����Ҫ����D���D�����Ժ�Ч�ʸߵȃ��c�������p���D��dspm늙C݆ʽ�ӵ�늄���܇������ȡ�����әC���Ͳ����X݆��������Ӳ�����������������������늙C�Ĺ��ʣ��������ϵ�y��Ч�ʵ�����ߡ�λ����̖�z�y��늙C���Ƶ���Ҫ�h�����ж�N��Q������λ����̖�·�cdspоƬ֮�g���B�ӣ��˿�Ҳ�����ж�N�x��
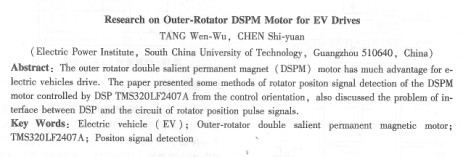
1 12/8�O���D��dspm늙C��B
1.1�Y��
�D1��һ�_����12/8�O���D���p�O����늙C����D���D��ֻ������a���@�M��i�����������ua��늙Ca��늄ӄݡ����ӘO���鶨���X���l��2����15�șCе�ǣ��@�ӿ��Ա��C���D���دB��֮�ͺ�����D�ӘO�����c�D��λ�ýǟo�P���Ķ�ʹ��϶�ϳɴŌ��鳣����늙C�o��λ���ء��D�ӘO�����D���X���l��2����22.5�șCе�ǣ�������ӘO����������������Q�ࡣ���⣬��һ�ඨ���@�M����朵Ĵ�會H�cԓ��Ō������ȡ�
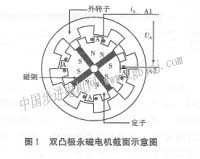
1.2늙C����
�D2��odspm늙C��늵�����ȫ���·�ؓ䡣
���x��igbts���ܹ���ģ�K��늙C�����@�M��y���B�ӣ��p�@�Mͬ�rͨ늵Ĺ�����ʽ��ÿһ���ؓ؟һ���ͨ�࣬��ÿһ��۵��Ϲ܌���ԓ��ͨ��늣��¹܌���ͨؓ늣����¹ܾ���ֹ�rԓ�ͨ늡�ÿ�����@�Mͨ����ڞ錦���D���D�^45�șCе�ǡ���һ��ͨ������ÿһ���@�M����30�șCе�ǹ���������ÿ��15�șCе�ǓQ��һ�Ρ�
����늙C���Ըм���朣��ֶξ��Ի�������ֻ���D�ӵĿ��gλ�����P��늙C��һ���늉��飺
��������Ŵ�机�늘з�����朽M�ɣ�a���ι����r��朷��̞飺
���ʷ��̞飺
1.3����ԭ��
��ʽ(4)��֪����a���@�Mͨ������r���S���D��λ�õIJ�ͬ��늘��@�M늸аl��׃�����a�������D�ط�����늸������^�a���Ĵ����D�؞������½��^�Ĵ����D�؞�ؓ�����Ը�鹴����D����һ��늸����ڵĺ���ֵ���㡣�S���D��λ�õIJ�ͬ��늘��@�M�����Ŵ�朰l��׃�����a�������D�أ������Ŵ�朵������^���½��^���a�����������D�ء�
�����p�O�oˢֱ��늙C�Ĵ����D����һ��ͨ����ڵ�ƽ��ֵ���㣬���늙C��ݔ���D����Ҫ�������D��tm�ṩ���D�صĴ�С����ͨ�^�����������С��ͨ�^�g���ȁ팍�F��Ҳ���Բ��Æ��Ļ��p�ĵ��\�з�ʽ�����ơ���׃����ĘO�Ժ͌�ͨ�����Ը�׃�D�ط���
��D3��ʾ���v�S�քe��늙C�Ĵ�朡��ԸС���������D�أ��M�S��늙C�D�ӵĽǶ�λ�á��O���D����rᘷ������D��늙C�\�������Ŵ��һ��׃�����ڞ�45�șCе�ǣ����xo��λ�Þ�a�ඨ���X���D���X�_ʼ�غϵ�λ�á� |