�ھ�C܉�E��ۙ�Ļ�ģ׃�Y������
�S��骣��
����ɽ��W���IӋ��C���ƹ��̺ӱ�ʡ���c����ң��ӱ��ػʍu066004��
ժ Ҫ����Һ���ھ�C�����b�õ�܉�E��ۙ�M�����о����ڷ�����Һ���ھ�C�����b�õĄ����W���̵Ļ��A�ϣ�ᘌ�����s�ķǾ��ԣ������һ�N�µ�Һ���ھ�C�����b��܉�E��ۙ�����������ÙC���ˌW��Փ�������������ɶ�Һ���ھ�C�����b�õ��������Մ����Wģ�ͣ��OӋ�ˎ���ͨ�V�����Ļ�ģ�����������õ�ͨ�V�����ĞV�����l��̖�Ĺ��ܣ�����������̖�Ķ��ӣ��o����Ҏ��܉�E��������Ŀ����������o���˿���ϵ�y���OӋ�������������ɶȹ����b���M���˷����о�����Y�����������OӋ�Ŀ��������O��܉�E�ĸ�ۙ�������õĄӑB���ԣ���ϵ�y�IJ��_���Ծ����^���������ԣ��ڴ���ģ���`����ⲿ�_�ӵ���r�£�ԓ���������_���߾��ȿ��ٸ�ۙ��Ŀ�ģ�����������ģ���ƵĶ��ӆ��}��
�P�I�~��Һ���ھ�C�������W���̣���ģ���ƣ�܉�E��ۙ
�ЈD���̖��tp 24 �īI���R�a��a
1�� ��
Һ���ھ�C��һ�N�V�������ڵVɽ���������ИI����Ҫ�b�䡣�S��Ӌ��C���g�İlչ���ھ�C����څ���ڙC���˻������ٿvϵ�y�Ŀ���Ҳ����˸��ߵ�Ҫ����Ό��Fƽ���߾��ȵ�܉�E��ۙ�ѳɞ��ھ�C�����Ԅӻ���һ���P�I���}�������ھ�C���ˁ��f�������ⲿ�ɔ_��δ֪�����������ď��Ǿ��Ե����أ����y�õ����_ģ�ͣ�������о��ھ�C���˵�܉�E��ۙ�r����ģ׃�Y��������һ�N�����������ķ�������ģ׃�Y��������һ�N�Ǿ��Կ��Ʋ��ԣ������Ժ��εĿ���Ҏ�Ɍ��F�ӑB�ͷ��B����֮�gì�ܵąf�{�������������_�Ӻͅ���׃�����������Լ��M�뻬��ģ�\�Ӻ����ȫ���m���ԣ�ʹ�û�ģ���ƏV�������ڷǾ���ϵ�y�����������С����@�N��������ͨ�^���N����ģʽ֮�g�ĸ��l�ГQ�팍�F�ģ����ڿ�����̖��ͻ׃���@���ǻ�ģ׃�Y������ϵ�y�еĶ���F�����p�t���������в����ęCеĥ�p���t������δ��ģ�ĸ��l�ӑB푑�����ʹ����ʧЧ��
���Q��ģ׃�Y�������г��F�Ķ���F������W���ѽ������һЩ��Q������magdym��abdelhameed�����һ�Nģ����ģ���Ʒ��������F�ˌ�܉�E�Ŀ��پ��_��ۙ����Ч�������˶���F��fang-ming yu,hung-yuan chung,shi-yuanchen���OӋ��ģ����ģ������Ҳ�ܺõؽ�Q�˷Ǿ���ݔ�벻�_���r��ϵ�y�Ķ����}��basilm��hadithi�������ڻ������θ�������һ߅��ӣ�����ͺ��������_�P�����ķ�����Q�˻�ģ�������q��Ć��}�����У����õ����ڻ������θ�������һ߅��ӣ�����ͺ��������_�P�������Q֮�顰߅��ӡ��������Еr����ͺ�����ϵ�y׃���B�mϵ�y������׃�Y��ϵ�y��
��ˣ����IJ���һ�N���ڎ���ͨ�V���Ļ�ģ׃�Y�����Ɓ팍�F�������ƶ��ӣ����ڻ�ģ������ݔ���˼����ͨ�V�������Ɍ����l���������̖�M����Ч�ĞV����
2Һ���ھ�C���P�������۵��������Մ����Wģ��
�ھ�C�����b����Ҫ�Ʉӱۡ��^�U���P���M�������ɶșC����
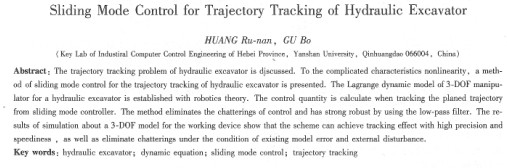
���˜�d-h����������������ϵ����Dl��ʾ��
�D�Єӱۡ����U���P�����|����m1��m2��m3���L�Ȟ�l1��l2��l3���D�Ǟ��1����2����3��r1��r2��r3���P�������أ�g���������ٶȡ����=[��1����2����3]t���t�����۵Ą����Wģ�͞�
3��ģ׃�Y�����������OӋ
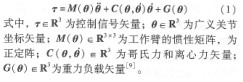
����ʽ(1)��һ�����s�ķǾ���ϵ�y�����ж��cؓ�m3����һ��������׃���IJ��_�����������@�ӵď��s����ϵ�y��Ҫ�����ۙ܉�E���ƣ����IJ���һ�N���ڎ���ͨ�V���Ļ�ģ׃�Y�����Ɓ팍�F�������ӿ��ƣ����ڻ�ģ������ݔ���˼����ͨ�V�������Ɍ����l���������̖�M����Ч�ĞV�������ڵ�ͨ�V�����Ļ�ģ����ϵ�y�Y������D2��ʾ��
|