���ڳ���(w��n)���ԵĻ�ϴŸ�ϵ�y(t��ng)�������O(sh��)Ӌ(j��)
����䓣�ꐘ�(sh��)�ģ�ꐻ���
����(gu��)���Ƽ���W(xu��)�őҸ����ģ������L(zh��ng)ɳ410073��
ժ Ҫ��ᘌ�(du��)늴����Ż����ems�Ÿ���܇�Ҹ���������(sh��)���(d��ng)����IJ��_���Ԇ�(w��n)�}��v popov����(w��n)����Փ����A(ch��)�O(sh��)Ӌ(j��)��ģ�ͅ������m��(y��ng)�Ҹ�������������(j��)ϵ�y(t��ng)�Ǿ���ģ�ͺ͑Ҹ����Ƶ�����ָ��(bi��o)Ҫ��_����ϵ�y(t��ng)�ą���ģ�͡����˝M��popov�����ėl�����O(sh��)Ӌ(j��)��ǰ���a(b��)�������õ��˱����e�����m��(y��ng)�ɡ��Y(ji��)�ϻ��ϵ�y(t��ng)��(sh��)�H�Ŀ������c(di��n)��(du��)���m��(y��ng)���M(j��n)���˺�(ji��n)�����������䷀(w��n)���ԡ������c��(sh��)�(y��n)�Y(ji��)���������������m��(y��ng)�C(j��)�ƺ�ϵ�y(t��ng)�Ą�(d��ng)�B(t��i)푑�(y��ng)�^(gu��)��ƽ��(w��n)�����g϶�A�S�r(sh��)���F(xi��n)����(w��n)���ԣ��Ķ��ܸ��ƴőҸ�ϵ�y(t��ng)�����ܡ�
�P(gu��n)�I�~����ϑҸ�������(w��n)�������m��(y��ng)����
�ЈD���̖(h��o)��tp 273 �īI(xi��n)��(bi��o)�R(sh��)�a��a
1����
늴����Ż�ϑҸ����g(sh��)���ڑҸ�����С����(du��)܇�d�Դ���g(sh��)Ҫ��͡����d�ȸߵȃ�(y��u)�c(di��n)���ɞ鮔(d��ng)ǰ���ʹőҸ��о��I(l��ng)��ğ��c(di��n)֮һ����(j��ng)���pid�͘O�c(di��n)���õȾ��Կ��Ʒ���ֻ�ܱ��Cϵ�y(t��ng)��ƽ���c(di��n)���������^�õĄ�(d��ng)�B(t��i)���ܣ���(d��ng)���d�|(zh��)��׃������(d��o)��ϵ�y(t��ng)�^���ƫ�xƽ���c(di��n)�r(sh��)��ϵ�y(t��ng)�đҸ����܌����@������ģ�ͅ������m��(y��ng)����( mrac)��������(j��)ϵ�y(t��ng)��B(t��i)��ݔ���`���{(di��o)�����ƅ���(sh��)��ʹ��(sh��)�Hϵ�y(t��ng)�@���c����ģ�͵�ͬ�����ܡ�popov����(w��n)����Փ���M(j��n)�����m��(y��ng)�����O(sh��)Ӌ(j��)�ͷ�������Ҫ�������c�������Z���O(sh��)Ӌ(j��)������ȣ��@�N�����ܵõ��Y(ji��)��(g��u)��(ji��n)�Ρ����{(di��o)����(sh��)�ٵ�mracϵ�y(t��ng)�����ڹ��̑�(y��ng)�á�
�鱣�C��ϴŸ�ϵ�y(t��ng)�ڳ��d�|(zh��)��׃��ǰ��đҸ���һ�£����Ļ���popov����(w��n)����Փ�O(sh��)Ӌ(j��)��ģ�ͅ������m��(y��ng)���������Ĺ��̑�(y��ng)�õĽǶȺ�(ji��n)���˿������Y(ji��)��(g��u)��
2���ϵ�y(t��ng)��ģ������ģ�͵��xȡ
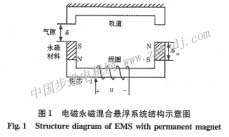
1)���ϵ�y(t��ng)�ķǾ���ģ�� 늴����Ż�ϴŸ�ϵ�y(t��ng)����D1��ʾ��
��Ǿ���ģ�͞�
ʽ�У�g���������ٶȣ��ء�����մŌ�(d��o)�ʣ��ء������Ų��ϵ�����(du��)�Ō�(d��o)�ʣ�������ųC�B����5���Ч�ŘO��e������늴ž�Ȧ�є�(sh��)��6�����������F�L(zh��ng)�ȣ�6��Ҹ��g϶��r�龀Ȧ��裻���龀Ȧ�ɶ�늉���i�龀Ȧ�����m��Ҹ��|(zh��)����f���������
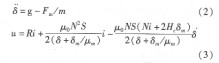
2)����ģ�͵��xȡ���ÿ�������h(hu��n)��������ĸ�ۙ�ٶȡ�����ͬ�r(sh��)�������ƽ���c(di��n)(6����i��)(i��=o)�M(j��n)��̩��չ�_(k��i)���õ�ϵ�y(t��ng)�ľ��Ԃ��f����(sh��)��
����(j��)ʽ(4)��֪����������h(hu��n)������ʹ��ԭϵ�y(t��ng)���A����Aϵ�y(t��ng)����(du��)�ڶ��Aϵ�y(t��ng)���ԣ���Ҫ��ָ��(bi��o)������f���l��m��ȡ����ģ�͞�
3 ����popov��Փ�Ŀ������O(sh��)Ӌ(j��)
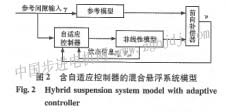
1)���m��(y��ng)�������Y(ji��)��(g��u)�����m��(y��ng)�������đҸ�ϵ�y(t��ng)ģ�ͣ���D2��ʾ��
����(j��)ʽ(4)��ʽ(5)��֪����ϴŸ�ϵ�y(t��ng)�ǟo(w��)���c(di��n)ϵ�y(t��ng)��������m��(y��ng)���������O(sh��)Ӌ(j��)�ɿ��]�����{(di��o)��(ji��)ǰ���ͷ����a(b��)���W(w��ng)�j(lu��)�����_(d��)����Ч�{(di��o)��(ji��)��(du��)��(sh��)��Ŀ�ġ�����(j��)����(w��n)��������Ҫ��ǰ�K���������(sh��)�ģ��xȡ���µ�ǰ���a(b��)������
�ڴőҸ������У�Ҫ��Ŀ���Ŀ��(bi��o)ͨ���鶨������߶��g϶���ƣ��Y(ji��)��popov����(w��n)����Փ�Ŀ������O(sh��)Ӌ(j��)���x�ñ����e�����m��(y��ng)�ɣ��t�����a(b��)�������ɞ�
���@��(g��)���m��(y��ng)���У��Q����e���Ք��ٶȡ��ڌ�(sh��)�H�ĴőҸ������У�λ�õ�����Ϣyͨ�^(gu��)���ٶȂ�������Ϣyp���ķe��y����(l��i)��(sh��)�F(xi��n)�����������ı����e�����m��(y��ng)���D(zhu��n)����
|