”╠CŻ»OS-IIį┌¤o╦óų▒┴„ļŖäėÖC┐žųŲųąĄ─æ¬(y©®ng)ė├
╠š į┤Ż¼ųņ╬─
(ųžæc┤¾īWŻ¼ųžæc400030)
š¬ę¬Ż║įO(sh©©)ėŗ┴╦╗∙ė┌ŪČ╚╦╩ĮīŹĢr▓┘ū„ŽĄĮy(t©»ng)IxCŻ»OS IIĄ─¤o╦óų▒┴„ļŖäėÖC▐D(zhu©Żn)╦┘ļŖ┴„ļpķ]Łh(hu©ón)┐žųŲŽĄĮy(t©»ng)ĪŻĮķĮB┴╦╗∙ė┌å╬Ų¼ÖCdsPIC30F6010AĄ─┐žųŲŽĄĮy(t©»ng)ė▓╝■ĮY(ji©”)śŗ(g©░u)Ż¼įö╝Üšf├„┴╦”╠CŻ»OS II╚╬äš(w©┤)Ą─Ęų┼õ║═įO(sh©©)ėŗĪŻ”╠Ż»OSĪ¬II║å╗»┴╦æ¬(y©®ng)ė├ŽĄĮy(t©»ng)▄ø╝■Ą─įO(sh©©)ėŗŻ¼┐╔ūxąįÅŖŻ¼▒Ńė┌ŠSūo║═öUš╣╣”─▄ĪŻ
ĻP(gu©Īn)µIį~Ż║”╠CŻ»OS-IIŻ╗dsPIC30F6010AŻ╗¤o╦óų▒┴„ļŖäėÖCŻ╗▐D(zhu©Żn)╦┘ļŖ┴„ļpķ]Łh(hu©ón)┐žųŲŽĄĮy(t©»ng)
ųąłDĘųŅÉ╠¢Ż║TM33 ╬─½Iś╦ūR┤aŻ║A ╬─š┬ŠÄ╠¢Ż║1004Ī¬7018(2010)05Ī¬0031Ī¬03
0ę²čį
¤o╦óų▒┴„ļŖäėÖC╩Ūę╗ĘNš²į┌┐ņ╦┘Ųš╝░Ą─ļŖÖCŅÉą═ĪŻ╦³▓╗ė├ļŖ╦óüĒōQŽ“Ż¼Č°╩Ū╩╣ė├ļŖūėōQŽ“Ż¼┼cėą╦óų▒┴„ļŖäėÖC║═Ėąæ¬(y©®ng)ļŖäėÖCŽÓ▒╚Ż¼Š▀ėąįSČÓā×(y©Łu)³cŻ¼╚ńĖ³║├Ą─▐D(zhu©Żn)╦┘▐D(zhu©Żn)Šž╠žąįĪó┐ņ╦┘äėæB(t©żi)Ēææ¬(y©®ng)ĪóĖ▀ą¦┬╩ĪóķLē█├³Īó▀\▐D(zhu©Żn)į¬įļ┬ĢĪó▌^Ė▀Ą─▐D(zhu©Żn)╦┘ĘČć·Ą╚Ż¼ÅVĘ║æ¬(y©®ng)ė├ė┌╝ęė├ļŖŲ„ĪóŲ¹▄ćĪó║Į┐š║Į╠ņĪóŽ¹┘MŲĘĪóßt(y©®)»¤Īó╣żśI(y©©)ūįäė╗»įO(sh©©)éõ║═āxŲ„Ą╚ąąśI(y©©)ĪŻ
”╠CŻ»OS II╩Ūę╗éĆį┤┤a╣½ķ_Īó┐╔ęŲų▓Īó┐╔╣╠╗»Īó┐╔▓├╝¶Īóōīš╝╩ĮĄ─ŪČ╚ļ╩ĮīŹĢr▓┘ū„ŽĄĮy(t©»ng)ĪŻ”╠CŻ»OSĪ¬II─▄╣▄└Ē64éĆ╚╬äš(w©┤)Ż¼▓ó╠ß╣®╚╬äš(w©┤)š{(di©żo)Č╚┼c╣▄└ĒĪóā╚(n©©i)┤µ╣▄└ĒĪó╚╬äš(w©┤)ķg═¼▓Į┼c═©ą┼ĪóĢrķg╣▄└Ē║═ųąöÓĘ■äš(w©┤)Ą╚╣”─▄Ż¼Š▀ėął╠(zh©¬)ąąą¦┬╩Ė▀Īóš╝ė├┐šķgąĪĪóīŹĢrlĒ§─▄ā×(y©Łu)┴╝║═┐╔öUš╣ąįÅŖĄ╚╠ž³cĪŻ▒Š╬─╗∙ė┌ŪČ╚ļ╩ĮīŹĢr▓┘ū„ŽĄĮy(t©»ng)”╠CŻ»OSĪ¬II║═å╬Ų¼ÖCdsPIC30F6010AįO(sh©©)ėŗ┴╦ę╗éƤo╦óļŖäėÖC┐žųŲŽĄĮy(t©»ng)ĪŻ┼cé„Įy(t©»ng)Ą─Ū░║¾┼_│╠ą“▓╗═¼Ż¼╗∙ė┌”╠CŻ»OSĪ¬II▓┘ū„ŽĄĮy(t©»ng)Ą─│╠ą“įO(sh©©)ėŗŻ¼īóę╗éĆ┤¾Ą─æ¬(y©®ng)ė├│╠ą“ĘųĮŌ│╔ČÓéĆ╚╬äš(w©┤)üĒ═Ļ│╔Ż¼─▄║▄┤¾│╠Č╚ĄžĮĄĄ═┐žųŲŽĄĮy(t©»ng)ķ_░l(f©Ī)ļyČ╚Ż¼┐sČ╠▄ø╝■ķ_░l(f©Ī)ų▄Ų┌ĪŻ
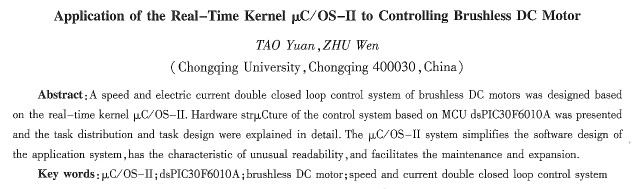
1¤o╦óų▒┴„ļŖäėÖC┐žųŲįŁ└Ē
¤o╦óļŖäėÖCĄ─ōQŽÓ╩Ū═©▀^ļŖūėĘĮ╩Į┐žųŲĄ─ĪŻ▐D(zhu©Żn)ūėĄ─╬╗ų├ė╔Č©ūėųąŪČ╚ļĄ─╗¶Ā¢é„ĖąŲ„Öz£yŻ¼├┐«ö▐D(zhu©Żn)ūė┤┼śOĮø(j©®ng)▀^╗¶Ā¢é„ĖąŲ„ĖĮĮ³Ż¼╦³éāŠ═Ģ■░l(f©Ī)│÷ę╗éĆĖ▀ļŖŲĮ╗“Ą═ļŖŲĮą┼╠¢Ż¼▒Ē╩Š▐D(zhu©Żn)ūėĄ─▒▒┤┼śO╗“─Ž┤┼śOš²Įø(j©®ng)▀^įōé„ĖąŲ„ĪŻĖ∙ō■(j©┤)╚²éĆ╗¶Ā¢é„ĖąŲ„ą┼╠¢Ą─ĮM║ŽŻ¼Š═─▄┤_Č©ōQŽÓĄ─Š½┤_Ēśą“Ż¼ĮoČ©ūė└@ĮM═©ļŖŻ¼īŹ¼F(xi©żn)¤o╦óļŖäėÖCĄ─ą²▐D(zhu©Żn)ĪŻ│Żė├120ĪŻļŖĮŪČ╚¤o╦óų▒ļŖäėÖCōQŽÓĒśą“╝░▐D(zhu©Żn)└@ĮM═©ļŖŪķør╚ńłD1╩ŠĪŻ▐D(zhu©Żn)ūė├┐▐D(zhu©Żn)▀^60ĪŻļŖĮŪČ╚Ż¼Ųõųąę╗éĆ╗¶é„ĖąŲ„Š═Ģ■Ė─ūāĀŅæB(t©żi)ĪŻ═Ļ│╔ę╗éĆļŖų▄Ų┌ąĶę¬ōQŽÓ┴∙┤╬ĪŻČ°═Ļ│╔ę╗éĆÖCąĄ▐D(zhu©Żn)äėŻ¼ę¬ųžÅ═Ą─ļŖų▄Ų┌öĄ(sh©┤)╚ĪøQė┌▐D(zhu©Żn)ūė┤┼śOī”öĄ(sh©┤)ĪŻ
2¤o╦óļŖäėÖC┐žųŲŽĄĮy(t©»ng)įO(sh©©)ėŗ
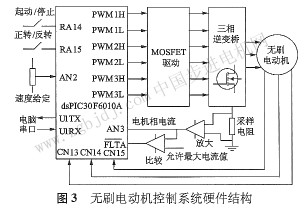
¤o╦óļŖäėÖC▐D(zhu©Żn)╦┘ļŖ┴„ļpķ]Łh(hu©ón)┐žųŲŽĄĮy(t©»ng)┐“łD╚ńłD2╦∙╩ŠĪŻ═ŌŁh(hu©ón)×ķ▐D(zhu©Żn)╦┘Łh(hu©ón)Ż¼ā╚(n©©i)Łh(hu©ón)×ķļŖ┴„Łh(hu©ón)ĪŻ▐D(zhu©Żn)╦┘Łh(hu©ón)Įø(j©®ng)PID▀\╦Ń║¾Ż¼×ķļŖ┴„Łh(hu©ón)╠ß╣®ļŖ┴„ĮoČ©ĪŻļŖ┴„Łh(hu©ón)į┘Įø(j©®ng)PID▀\╦ŃŻ¼┐žųŲPWMš╝┐š▒╚▌ö│÷Ż¼š{(di©żo)╣Ø(ji©”)ļŖÖCĄ─▐D(zhu©Żn)╦┘Ž“ĮoČ©╦┘Č╚ūā╗»ĪŻļŖ┴„Łh(hu©ón)Ą─ł╠(zh©¬)ąąŅl┬╩ę¬▒╚▐D(zhu©Żn)╦┘Łh(hu©ón)Ė▀ĪŻ
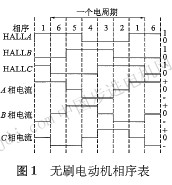
 ▒Šė▓╝■ŽĄĮy(t©»ng)ų„ę¬ė╔╬ó┐žųŲŲ„ĪóM0sFET╚²ŽÓ─µūāś“ļŖ┬ĘĪó╣”┬╩“ī(q©▒)äėļŖ┬ĘĪóÖz£yļŖ┬Ę║═▒ŻūoļŖ┬Ęśŗ(g©░u)│╔Ż¼łD3×ķ¤o╦óļŖäėÖC┐žųŲŽĄĮy(t©»ng)ė▓╝■┐“łDĪŻdsPIc30F610A╩Ūę╗┐ŅīŻķT×ķŪČ╚ļ╩ĮļŖÖC┐žųŲæ¬(y©®ng)ė├įO(sh©©)ėŗĄ─McuŻ¼Š▀ėą▌ö╚ļļŖŲĮūā╗»═©ų¬ę²─_ĪóļŖÖC┐žųŲīŻė├PwM─ŻēKĪóPwM╣╩šŽę²─_FLTAŻ¼┐╔═¼Ģr▓╔śėūŅČÓ4┬ĘĄ─ADcĪó┤«┐┌Ą╚═ŌįO(sh©©)ĪŻcNl3ĪócNl4ĪócNl5×ķ▌ö╚ļļŖŲĮūā╗»═©ų¬(cN)ę²─_Ż¼«ö╗¶Ā¢é„ĖąŲ„ą┼╠¢Ą─ļŖŲĮ░l(f©Ī)╔·ūā╗»ĢrŻ¼«a(ch©Żn)╔·ļŖŲĮūā╗»═©ų¬ųąöÓŻ¼▓ČūĮ¤o╦óļŖäėÖC╗¶Ā¢é„ĖąŲ„ą┼╠¢ĪŻPwMlHĪ½PwM3L┐╔īŹ¼F(xi©żn)6éƬÜ┴ó╗“3ī”╗źčaPwM▌ö│÷Ż¼“ī(q©▒)äėM0sFET╚²ŽÓ─µūāś“ļŖ┬ĘŻ¼┐žųŲ└@ĮM╔Ž╩®╝ėĄ─ļŖē║Ż¼Ė─ūāļŖÖCĄ─▐D(zhu©Żn)╦┘ĪŻ¤o╦óļŖäėÖCį┌╚╬ęŌōQŽÓĢr┐╠Ż¼ų╗ėąā╔ŽÓ└@ĮM═©ļŖŻ¼╣╩ų╗ąĶę¬ę╗┬ĘļŖ┴„▓╔śėļŖ┬ĘĪŻĄ½▀@ĘNļŖ┴„▓╔śė×ķ─ĖŠĆļŖ┴„▓╔śėŻ¼ąĶę¬į┌PwMĖ▀ļŖŲĮĄ─ųą³c▓╔śėļŖ┴„ųĄŻ¼▓┼─▄Ą├ĄĮ▌^£╩┤_Ą─ŽÓļŖ┴„ųĄĪŻ└@ĮMļŖ┴„┴„Įø(j©®ng)▓╔śėļŖūĶŻ¼«a(ch©Żn)╔·Ą─ļŖē║ĮĄĮø(j©®ng)▀\Ę┼Ę┼┤¾Ż¼ę╗┬Ę▌ö╚ļĄĮADc─ŻēKĄ─▌ö╚ļ═©Ą└AN3Ż¼▀MąąļŖÖCŽÓļŖ┴„▓╔śėŻ¼ę╗┬Ę┼cįO(sh©©)Č©****ļŖ┴„▀Mąą▒╚▌^║¾Ż¼▀BĮėĄĮPwM╣╩šŽę²─_FāįAŻ¼īŹ¼F(xi©żn)ļŖÖCĄ─▀^┴„▒ŻūoĪŻ
×ķ┴╦╠ß╣®╦┘Č╚ĮoČ©Ż¼īóę╗éĆļŖ╬╗Ų„▀BĮėĄĮADcĄ─ę╗éĆ▌ö╚ļ═©Ą└AN2ĪŻā╔éĆķ_ĻP(gu©Īn)ė├üĒ┐žųŲļŖÖCĄ─Ų═Ż║═š²Ę┤▐D(zhu©Żn)ĪŻ┤«┐┌ė├üĒé„╦═ŪČ╚ļ╩ĮīŹĢr▓┘ū„ŽĄĮy(t©»ng)Ą─╚╬äš(w©┤)▀\ąąĀŅæB(t©żi)║═ļŖÖC╦┘Č╚ą┼ŽóĮo╔Ž╬╗ÖC’@╩ŠĪŻ
3╗∙ė┌”╠CŻ»0sĪ¬IIĄ─▄ø╝■įO(sh©©)ėŗ
3Ż«1”╠CŻ»osĪ¬IIį┌dsPIc30F╩»010A╔ŽĄ─ęŲų▓
į┌”╠cŻ»0sĪ¬IIęŲų▓▀^│╠ųąŻ¼┼cæ¬(y©®ng)ė├│╠ą“ėąĻP(gu©Īn)Ą─╬─╝■╩ŪosĪ¬cFG H║═INcLuDEsŻ«HŻ¼┼c╠Ä└ĒŲ„ėąĻP(gu©Īn)Ą─╬─╝■ėąOs_CPU HĪó0s_CPUĪ¬c.cĪóos_cPll-AŻ«AsMĪŻ
|