������ɽ�㷨�ڴ�T���L(f��ng)�ϵ�y(t��ng)�еđ�(y��ng)��
�S�ص����R�������S��Ԫ
���ϴ�W(xu��)늚��c��Ϣ���̌W(xu��)Ժ�������Lɳ410082
ժ Ҫ��ᘌ��L(f��ng)���l(f��)��L(f��ng)�ٵ��S�C�ԺͲ��_���ԣ��Լ���T�������L(f��ng)���l(f��)�ϵ�y(t��ng)ݔ���������L(f��ng)�C�Cе���ʺ������ęCе���ܵ�׃���ʵĽ���Ӱ����c�����һ�N������ɽ������������****�L(f��ng)�ܲ��㷨�����˵õ��^����׃�ٷ�������������O����������pwm��׃��֮�g���������ز�����������ɽ�㷨����****ֱ��������ƣ��{(di��o)��(ji��)ݔ��ֱ������Ը���****�ą���������a(ch��n)����ͬ�D(zhu��n)�ؿ���늙C���D(zhu��n)���I�F(xi��n)****���ʸ�ۙ��������ɽ�㷨���A(ch��)�����Ӕ�(sh��)��(j��)�惦��ݔ�����ܣ�������äĿ����ɽ���������ͨ�^viatlah��һ��50 kw����ֱ�(q��)�L(f��ng)���l(f��)�ϵ�y(t��ng)�M���˷�������������˂��y(t��ng)��ɽ�㷨�c������ɽ�㷨��****�����c��ۙ�ϵIJ�e������Y(ji��)����C��ԓ�㷨�Ŀɿ��ԣ�����������ɽ�㷨�ڴ�T��׃�ٺ��l�L(f��ng)���l(f��)�ϵ�y(t��ng)�о��и��õČ����ԡ�
�P(gu��n)�I�~������ֱ�(q��)�L(f��ng)���l(f��)늣�****���ʸ�ۙ��������ɽ���ݣ�ֱ���������
�Ї����̖��tp 27 �īI���R�a��a
1���� ��
�L(f��ng)���l(f��)늵İl(f��)չ���H�����������(j��ng)��Ч��(y��ng)Ҳ�����˾�ĭh(hu��n)��Ч��(y��ng)��Ȼ���L(f��ng)���l(f��)늵Ļ��A(ch��)Ͷ�Y������Ȼ�l���Ƽs���\��С�r��(sh��)�ͣ��L(f��ng)�������ʵͣ��������L(f��ng)���l(f��)늵�Ͷ�Y�y�ȣ��Ƽs���L(f��ng)���l(f��)늵İl(f��)չ������о�****�L(f��ng)�ܲ�������Ҫ���x��
��ɽ�㷨���䌍�F(xi��n)�������Σ��Ȳ���Ҫ�y���L(f��ng)��Ҳ����Ҫ�y���L(f��ng)�C�Cе�������ԣ���Ŀǰ��(y��ng)�ÏV����****�L(f��ng)�ܲ��㷨��Ȼ�����y(t��ng)���㷨ֻ�m�����L(f��ng)�C�T��ʮ��С�r���������ڴ�T���L(f��ng)�Cϵ�y(t��ng)��ݔ���������L(f��ng)�C�Cе���ʺ������ęCе����׃���ʵĽ���Ӱ푣����y(t��ng)��ɽ�㷨���S�C����׃�����L(f��ng)�ٲ��ܿ��ٸ�ۙ��ۙЧ�������롣��������ڷ����L(f��ng)���C���Ժ���ɽԭ�����A(ch��)�ϣ��������ֱ�����������ɽ�����㷨��
2�L(f��ng)���C����
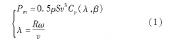
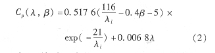
����(j��)ؐƝ( betz)��Փ���L(f��ng)݆�C���H�õ��Ĺ����c�L(f��ng)�ٵ����η����P(gu��n)�����L(f��ng)��v���\�Еr����λ�r�g��(n��i)���@���L(f��ng)�ܞ�
ʽ�У�p��՚��ܶȣ�s���L(f��ng)݆�Ē�����e��r���L(f��ng)݆�돽(m)��v���L(f��ng)�٣��؞��L(f��ng)݆���D(zhu��n)�Cе���ٶȣ�cp���ˣ��£����L(f��ng)������ϵ��(sh��)����ӳ���L(f��ng)݆�C�����L(f��ng)�ܵ�Ч�ʣ������~���ٱȦ˺͘��~��(ji��)��Ǧµĺ���(sh��)��
���Ͽ�֪��һ�����L(f��ng)���£��L(f��ng)�Cݔ������ȡ�Q�ڹ���ϵ��(sh��)cp (��)���ڲ�ͬ���L(f��ng)���£�ֻҪ�����L(f��ng)�C�D(zhu��n)��ʹ�ÝM���~���ٱȦ�=��opx���tcp (��) =cpmax���ɵõ���ͬ�L(f��ng)����****���ʣ�������������Dl��ʾ��
3���y(t��ng)��ɽ�㷨ԭ��
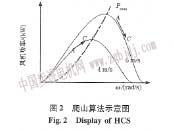
�ɂ��y(t��ng)��ɽ�㷨ԭ������ɽ�㷨ʾ��D����D2��ʾ��
�ĈD2�ɿ�����ͬһ�L(f��ng)���£���(d��ng)�L(f��ng)���C�\���ڹ���������һ�ca�r��ָ���D(zhu��n)��ʩ���^С�Ĕ_��ֵ���أ��˕r���\���c����c����pc>pa���t�f����(d��ng)ǰ�L(f��ng)���C�\���c��****�����c����߅���˕r��(y��ng)�x��_�ӷ�����D(zhu��n)�����ӵķ�����pc<pa���t��(d��ng)ǰ�L(f��ng)���C�\���c��****�����c��߅���˕r��(y��ng)�x��_�ӷ�����D(zhu��n)�ٜpС�ķ����Դ�߉���L(f��ng)���C��Փ�\���ں��c����������****�����c�Ƅӣ���K��****�����c�_��ƽ�⡣
���Ļ��ڴ������������_����ɽ���ݣ�ͨ�^����ֱ��������a(ch��n)����ͬ���D(zhu��n)�؏Ķ�����늙C���D(zhu��n)�ٝM��һ�����ٱȵ�Ҫ��ۙ****��������������늙C�D(zhu��n)���c�㶨��ŵķ�ֵ늉��ɱ��������ɶ��O���������V����ֱ��늉�ֵ�õ��l(f��)늙C�D(zhu��n)�٣��Ķ�ʡȥ��늙C�D(zhu��n)�ٜy���^�̣�������㷨�ɿ��ԡ�
4������ɽ�㷨ԭ�������Ʋ���
i)�_��ԭ����Ӌ����y(t��ng)׃���L��ɽ�㷨ּ�ڌ��D(zhu��n)���M�Д_���Ԍ���****�D(zhu��n)�٣�Ȼ��ͨ�^�D(zhu��n)����h(hu��n)����ϵ�y(t��ng)ۙ****�D(zhu��n)��ָ��ݔ��****���ʡ��c���y(t��ng)��ɽ�㷨���Ʋ��Բ�ͬ������ɽ�㷨����****ֱ��������ƣ��{(di��o)��(ji��)ݔ�������ز�����ֱ������Ը���****�ą�������Ķ���ۙ�L(f��ng)���C��****�����c������_�ӷ����Д࣬Ҋ��1��
|