�����p�ӻ�ģ��Ş�d��ֱ�b��Cе���[����
��܊1������2
1����܊���ʹ��̌WԺ�w��������ϵ��ɽ�|���_264001;2��܊���չ��̌WԺ�о���������ꠣ�ɽ�|���_264001
ժ Ҫ���������Ş�d��ֱ�b��Cеϵ�y���Ԅӻ��̶Ȳ��߂亣���b���������OӋһ�����u�������܉F���b���^�������Ƶ��صēu�[���_�����u��Ŀ�ģ���Ş�d��ֱ�b��Cеϵ�y����һ�����ęC���˙Cе��ϵ�y�������]�亣�����I�r�Ĺ����h�������ÙC���˄����Wԭ��������ӻ����l���µĄ����Wģ�ͣ�ᘌ�ģ�͵ď��s�����Ǿ��ԡ�Ƿ�ӡ����Еr׃���������c��������һ�����Aģ���Է�����������OӋ������ȡ�����c����׃������ģ�������p�ӻ�ģ׃�Y�����Ʒ��������u�������M���OӋ�������о����������OӋ�ķӻ�ģ׃�Y�����������ӻ�ģ�涼���_�����������ڷ��u�������Ŀ����£����D���܉��ۙ���OӋ��܉�E��ͬ�r����Ч�����Ƶ��صĔ[�ǣ��_�����u��Ŀ�ģ�
�P�I�~��Ş�Դ�ֱ�b��Cе���C���˄����Wԭ������ģ���ƣ����u���ƣ�����
�ЈD���̖��tp 27 �īI���R�a��a
1����
Ş�d��ֱ�b��Cе��Ş�d��ֱ�l��ϵ�y��һ�N���P��������s�ۯBʽ�طN���ؙC������Ş�d�������b�����I�����ں��������Լ������c�b��Cе��ĩ����ͨ�^������|�B�ӣ����ɱ���ؕ��a���[�ӡ��@�N�[�ӌ��b��Ĺ���Ч�ʺ����I��ȫ�����a���ܴ��Σ����ֱ��Ӱ��b��Ŀ����ԣ������������������b���^���еĔ[������������b��Ч�ʣ����F�����a�o�Ķ���߲�ꠑ������P�I���g֮һ��
�������ؙC�ķ��[���Ƽ��g�����������S���W�����^�о������īI[1]����ݔ���}�_��������������ʽ��܇ؓ�d�[�ӣ��īI[2]���û�ģ׃�Y�����ƌ��F�˘�ʽ��܇��С܇���K�L��λ��ͬ�r������ؓ�d�[�ӵĿ��ƣ��īI[3]�����Կ��_����������ʽ��܇ϵ�y�M�ж�λ�ͷ��[���ƣ�ȡ�������õĄӑB���o�B���Եȡ�����Ş�d��ֱ�b��Cе������C�����ں������I�r���ܵ������L�˵�Ӱ푣���˼Ӵ�������[���Ƶ��y�ȡ�
���ĸ���Ş�d��ֱ�b��Cе���[������Ҫ������˲����p�ӻ�ģ׃�Y�����ƌ��F���ؔ[�������Ŀ��Ʋ��ԡ�
2�����Wģ�͵Ľ���
ͨ�^��Ş�d��ֱ�b��Cе�ĽY���M�з��������l�F���c���P�����ԙCе�ֽY����ƣ����C���˄����W��ģԭ���ǽ�Q�Cе��ϵ�y�Ą����W��ģ�ĺܺõķ�����
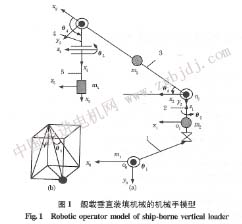
��ˣ��ɑ��ÙC���˄����W��ģ�����Pԭ������Ş�d��ֱ�b��Cе��ʾ�əCе��ģ�ͣ���D1��ʾ��
�D�У��U��l��̓�M�U��������Ş�����������Ǐ�Ş���M�u�u�ģ�ֻ���]�M�u���ã����b��C�C����̓�M�U�������Oԓ�U����һ�˼��M�u�u���ǹ̶���һ���_���Ą��ԙC���ϣ����@�M�u�S�D�ӣ��P��׃�����1�����M�u�ǣ��U��2���b��C���D�ۣ��P��׃�����2ƽ�_���D�Ƕȣ��U��3�����رۣ��P��׃�������۵ĸ����ǶȦ�3�U��5��ҵ���|�͵��أ����ڵ������ɵؑҵ��ڱۼܵĵ�픣����������صĿ��g�\�ӣ�����һ���|�����L�Ⱦ������̓�M�����������c֮���B��̓�M�P�����P��׃����4����5���ҵ���|���L���������������ڵ�픵Ŀ��gλ�á����U����ֻ��һ�����ɶȣ��U���gͨ�^���D�P���B�ӣ��麆���������ٶ����U���H�����|��̎���м����|������ҕ���U���鄂�ԡ�
���]���æ�4�������ؔ[��ֱ�^���ʲ��ÈD1(b)�еĔ[�Ƕʴ�֮�����У��� =��3+��4- ��/2����|������ƽ���ϵ�ͶӰ�c�U�����ĊA�ǣ���5����|�c����ƽ��ĊA�ǡ��Olb����۵��L�ȣ�lr������|�ĵ���픵ľ��x��h����D�۵ĸ߶ȣ���ex��ey��ez���������|����Ş���M�u��������ϵ�е����ˣ�re3���픵������|�ĵľ��x��
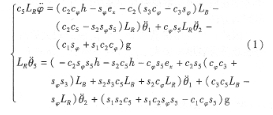
�\��ţ�Dһ�W�����f�ƹ�ʽ��6������Ş�d��ֱ�b��Cе�Ą����Wģ�ͣ���ͨ�^����̎����K�õ�Ş�d��ֱ�b��Cе���ؔ[��ϵ�y�Ą����Wģ�͞�
���̽M(1)��һ�M�dz����s�Ķ�׃��������ϡ����Ǿ��ԵĶ��A�ַ��̽M�����܉��^��ʴ_�ط�ӳŞ�d��ֱ�b��Cе�M�л��D�\�ӕr���ص��\�Ӡ�B |