ݔ�����Y(ji��)��(g��u)���(d��ng)ϵ�y(t��ng)��h���ɿ�����
�O����1�����1������2
1�m�ݽ�ͨ��W(xu��)�Ԅ�(d��ng)���c늚�̌W(xu��)Ժ�����C�m��730070
2�|�ϴ�W(xu��)��ľ���̌W(xu��)Ժ�����K�Ͼ�210096
ժ Ҫ��ᘌ�(du��)һ���ݔ��r(sh��)׃�r(sh��)���ĽY(ji��)��(g��u)���(d��ng)ϵ�y(t��ng)���о����ڈ�(zh��)�����l(f��)��������r��ϵ�y(t��ng)ȫ�֝u����(w��n)���������ʡ��ɿ������O(sh��)Ӌ(j��)�Ć��}�����ȸ���(j��)�����Y(ji��)��(g��u)���W(xu��)ԭ���������˰�������ݔ�����(zh��)�������ϵȵĽY(ji��)��(g��u)ϵ�y(t��ng)��B(t��i)ģ�͡�Ȼ�����lyapunov��(w��n)������Փ�;��Ծ�ꇲ���ʽ̎�������o����һ��(g��)�r(sh��)����ه��h�����ɿ�����(d��ng)�����㷨���ҿ��������ڵij�֗l���Ծ��Ծ�ꇲ���ʽ����ʽ�o����ͨ�^��(du��)һ��(g��)�����ɶȽ����Y(ji��)��(g��u)ģ����ei centro�������������(d��ng)������(d��ng)���Ʒ��棬�(y��n)�C�����᷽���Ŀ����ԣ������ڹ��̽Y(ji��)��(g��u)�����(d��ng)���ơ�
�P(gu��n)�I�~���Y(ji��)��(g��u)���(d��ng)ϵ�y(t��ng)��h�����e(cu��)���ƣ�ݔ��r(sh��)׃�r(sh��)�����r(sh��)����ه����(zh��)����ʧЧ
�ЈD���̖(h��o)��tp 273 �īI(xi��n)��(bi��o)�R(sh��)�a��a
1�� ��
��������S�����̼�����(z��i)�p��(z��i)�I(y��)�İl(f��)չ���Y(ji��)��(g��u)ϵ�y(t��ng)������(d��ng)�����ѳɞ���ľ�����I(l��ng)����о����c(di��n)������(n��i)��W(xu��)��������T��****���ơ�ģ�B(t��i)���ơ���(j��ng)�W(w��ng)�j(lu��)���Ƽ�ģ�����Ƶȶ�N�����㷨����ȡ���˃�(y��u)���ijɿ�(j��)���īI(xi��n)[2]��(du��)�Y(ji��)��(g��u)ϵ�y(t��ng)��h�����M(j��n)�����о������]�Ќ�(du��)���������M(j��n)���о����īI(xi��n)[3]���H�ڱ��Cϵ�y(t��ng)����h�����ܵĻ��A(ch��)��߀��(du��)�Y(ji��)��(g��u)����(sh��)�Ĕz��(d��ng)����һ���������ԣ��īI(xi��n)[4]���������ܵĻ��A(ch��)��߀��(du��)��(zh��)��������͆��}�M(j��n)���˳������о���Ȼ���@Щ������Ҫ�о��˽Y(ji��)��(g��u)ϵ�y(t��ng)�Ĝp���Ժ͌�(du��)����(sh��)�z��(d��ng)�������ԣ�����(du��)�Y(ji��)��(g��u)ϵ�y(t��ng)��ݔ�����Ϳɿ��Ԇ��}�ķ����Ժ�ȱ��������(du��)�@��}���о��ܿh�й��̌�(sh��)�����x�����У�ݔ��r(sh��)��Ч��(y��ng)�ѳɞ�һ��(g��)���ݺ�ҕ�Ć��}���M�ܶ���(sh��)��r���@�N�r(sh��)����С�����ԕ�(hu��)ʹ����(d��ng)������(d��ng)Ҏ(gu��)�t�cϵ�y(t��ng)��ͬ������(d��o)�±���ϵ�y(t��ng)ʧ��(w��n)���īI(xi��n)[5-6]�о���ݔ�����Ć��}�����]�п��]�������ܷ������}�����⣬�ɿ�����Ҳ�ǿ���ϵ�y(t��ng)�܉������\(y��n)�е��P(gu��n)�I����֮һ�����漰������ȫ�Č�(sh��)�H���̑�(y��ng)���нY(ji��)��(g��u)����ϵ�y(t��ng)�Ŀɿ����@���Ȟ���Ҫ�����ɿ�������ԓ�I(l��ng)��đ�(y��ng)����δҊ��(b��o)����
ᘌ�(du��)�������}�����īI(xi��n)[7ĸ]�Ļ��A(ch��)���Ƴ�һ��(g��)�ɝM���s���l���ɿ����������O(sh��)Ӌ(j��)��������ͬ�r(sh��)��Q���(d��ng)�����I(l��ng)����������������(sh��)�H���}��
2���}����
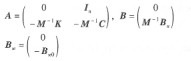
���]����n���ɶȵĽY(ji��)��(g��u)ϵ�y(t��ng)��
ʽ�У�m��c��k�քe��ϵ�y(t��ng)���|(zh��)����ꇡ������ꇺ̈́��Ⱦ�ꇣ�bu,bw0���քe��ݔ�˅���(sh��)��ꇺ��ⲿ�ɔ_����(sh��)��ꇣ���l(t)��ϵ�y(t��ng)�ij�ʼλ�ƣ����B�m(x��)���A�⻬�Ɍ�(d��o)��
���O(sh��)ݔ��r(sh��)��d(t)�M��o��d(f)��r��0��d(t)��d<l���tʽ(1)�Ɍ������²��_��ݔ��r(sh��)�����Ԡ�B(t��i)ϵ�y(t��ng)��
ʽ�У�x(t)��rn��ϵ�y(t��ng)��B(t��i)׃����u(t-d(t))��rn��ϵ�y(t��ng)�Č�(sh��)�H����ݔ�룻ϵ�y(t��ng)��ʼֵ��(t)���B�m(x��)�⻬����������(sh��)��ʽ(1)�õ����ң�
���{(di��o)ݔ���O(sh��)��
ʽ�У�c���{(di��o)��ϵ�y(t��ng)���ܵę�(qu��n)ֵ��ꇣ��{(di��o)��(ji��)��d�������ƿ��������档
ᘌ�(du��)ϵ�y(t��ng)(2)������ȡ��B(t��i)���������ɞ�
���]����(zh��)��������ʧЧ�����IJ��È�(zh��)�����_�P(gu��n)����ģ�ͣ���������_�P(gu��n)���l����������ھ��b�ͷ��������k֮�g������ʽ��
���У��؞��(zh��)���������_�P(gu��n)�и��N���ܹ��ϵļ��ϡ�
|