��Ԫ�C�M�f(xi��)�{(di��o)����ϵ�y(t��ng)���Ʋ����о�
����Ƽ
���������Ƽ��WԺ��ŌWԺ������7f�����Ii50027��
ժ Ҫ��ᘌ���Ԫ�C�M�f(xi��)�{(di��o)����ϵ�y(t��ng)��׃��������ϡ��r׃�����������c�����һ�N���ô�(li��n)���a�������������pid�������������Ŀ��Ʋ��ԡ�ԓ���Ʋ������Ȍ�ϵ�y(t��ng)�M�д�(li��n)���a���I�F(xi��n)��ȫ�����ͨ�^����������ϵ�y(t��ng)�M�к�����Ȼ��Ѷ�׃���Ŀ��Ɔ��}�D(zhu��n)���������׃�����ٌ�������׃������pid�������M����������ͨ�^��125 mw��Ԫ�C�M�f(xi��)�{(di��o)����ϵ�y(t��ng)�ķ��������֪���@�N������Ч������ݔ���cݔ��֮�g�ď���ώ����IJ���Ӱ푣�ʹϵ�y(t��ng)ݔ����(w��n)��������Ч���á�
�P�I�~����Ԫ�C�M���f(xi��)�{(di��o)���ƣ������(li��n)�a������pid
�ЈD���̖��tp 27 �īI���R�a��a
1����
���ͻ����l(f��)늙C�M������偠t����݆�C�M�Ɇ�Ԫ�C�M�M�Ѕf(xi��)�{(di��o)���ƣ������ж�׃���������ᡢ�r׃�����������c����ˣ�����Ʋ��Ե��OӋֱ�ӛQ���˅f(xi��)�{(di��o)����ϵ�y(t��ng)�Ŀ���Ʒ�|(zh��)����Ҏ(gu��)�ąf(xi��)�{(di��o)���Ʒ�����Ҫ�Dz�ȡ���εĴ�(li��n)�����a����ʩ���y�ԝM��f(xi��)�{(di��o)����ϵ�y(t��ng)���|(zh��)���Ŀ���Ҫ��
����������S��������Փ�İl(f��)չ���µĿ��Ʋ��Բ���ӿ�F(xi��n)��������z���㷨��ģ�������ķ�������ģ�����m�����ơ�drnn�����M�ͽ��������׃��ģ���A�y���Ƶȣ����@Щ�����ձ���ڿ��Ʋ��ԽY(ji��)�����s���Ү����،���(sh��)�Wģ�Ͱl(f��)��׃���r���Ƶ�Ч���͕�׃���ȱ�c����Ŀǰ���õĆ�׃��pid���������g�m���@�ظ��M�˿���ϵ�y(t��ng)�đ���Ч�����s���˿���ϵ�y(t��ng)���{(di��o)ԇ�r�g�������ڶ�׃���^���c��׃���^�������|(zh��)�ϴ��������|(zh��)�ą^(q��)�e�����Ԇ�׃��pid�����������y�����ڶ�׃���^�̡���ˣ��������һ�N���Æ���(li��n)�a�����������˶�����׃��pid�������������ķ������@�N���������@���ظ��M����ϵ�y(t��ng)�Ŀ���Ʒ�|(zh��)�������I(y��)�����a(ch��n)�ʺͽ�(j��ng)��Ч�档
2��Ԫ�C�M�f(xi��)�{(di��o)����ϵ�y(t��ng)�ĽM��
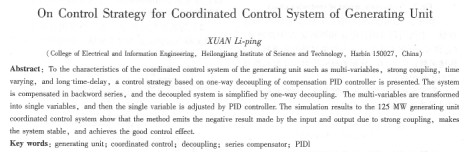
��Ԫ�C�M�f(xi��)�{(di��o)����ϵ�y(t��ng)���J����һ�N�����f�A����ϵ�y(t��ng)��ϵ�y(t��ng)������D����D1��ʾ��
���У��C�t�f(xi��)�{(di��o)��������һ����׃����������������ϵ�y(t��ng)�ĺ��IJ��֣��ɮa(ch��n)��ָ�]�C�t������������偠tָ������Cָ�����̎�ھֲ����Ƽ�����ϵ�y(t��ng)����偠tȼ�Ͽ���ϵ�y(t��ng)���L������ϵ�y(t��ng)����݆�C���ʡ��l���{(di��o)��(ji��)ϵ�y(t��ng)�Լ�ֱ��偠t�Ľoˮ����ϵ�y(t��ng)���Ķ����ָ���Ŀ����΄ա�
3��Ԫ�C�M�ӑB(t��i)��(sh��)�Wģ��
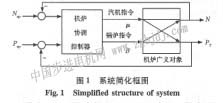
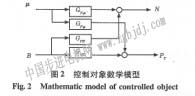
����偠t��Ԫ�C�M�ڱ���ȼ����(w��n)�������֠t�ʼn������oˮ�����c����������ƽ�����������ضȿ�������������ǰ���¿ɺ�����һ�������pݔ���pݔ���ı��،�����D2��ʾ��
�D�У��C�M��ݔ�����ʢ��͙Cǰ����pt�鱻�����������T�{(di��o)��(ji��)�y�_�Ȧ̺�ȼ����b���������gn����gnr�քe��l(f��)늙C���l(f��)���ʌ��_�Ⱥ�ȼ�����Ă��f����(sh��)��gp�̺�gpb�քe��Cǰ�������_�Ⱥ�ȼ�����Ă��f����(sh��)��
�ٶ�ϵ�y(t��ng)�龀�Լ��Ѕ���(sh��)ϵ�y(t��ng)���t��Ԫ�C�M�ܿ��^�̄ӑB(t��i)���Կ�����ʽ��ʾ��
4��Ԫ�C�M�f(xi��)�{(di��o)����ϵ�y(t��ng)�����OӋ
�����OӋ�Ļ���ԭ�������O��һ���a���W(w��ng)�j�����Ե��������ڸ���·֮�g���P(li��n)����ʹ���������܌��F(xi��n)��׃�����ƣ��Ѷ�׃�����Ɔ��}�D(zhu��n)���������׃�����Ɔ��}��̎����
1)�������ϵ�y(t��ng)�Ĕ�(sh��)�Wģ���о������125 mw��Ԫ�C�M��偠t��ߜء����R�牺�������g�ٟᡢ��Ȼѭ�h(hu��n)���Πt��ǰ�_ȼ����ȼ�������偠t����݆�C����S�����ס����������ٟᡢ�����_��ʽ���ɈD2��֪������Ɣ�(sh��)�Wģ�͞�
�o����********���r�µĔ�(sh��)�Wģ |