�p�ؽ�ģ�c���x���R���g(sh��)��fpga��(sh��)�F(xi��n)
���x1���n����2���R��Ƽ1������1
����(li��n)�ϴ�W(xu��)ţ�ﻯ�W(xu��)���̌W(xu��)Ժ������100023,2����������W(xu��)��Ϣ�ƌW(xu��)�c���g(sh��)�W(xu��)Ժ������100029
 ժ Ҫ��ᘌ��S������(qi��ng)�S�C(j��)�ɔ_���y���ó�Ҏ(gu��)�������R�Ą�(d��ng)�B(t��i)ϵ�y(t��ng)�����һ�N�Ǿ��Զ�׃����(d��ng)�B(t��i)ϵ�y(t��ng)���p�ؽ�ģ�c���x���R���g(sh��)��fpca�ϵ��I�F(xi��n)��ͨ�^���Ǿ�����ͨ�����Է���������ddsi���g(sh��)�M(j��n)�н�ģ��������(g��u)��bp��(j��ng)�W(w��ng)�j(lu��)���\(y��n)����С���˱��R���㷨�@ȡ��(sh��)�W(xu��)ģ�ͣ����У�����ģ�͵���Ҫ�㷨��ϵ�y(t��ng)����(sh��)��Ӌ(j��)�����P(gu��n)��fpca�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)ͨ�^verilog�Z�ԵĽY(ji��)��(g��u)������(sh��)��(j��)��������������ͬ�r(sh��)����fpga���ھ����ؘ�(g��u)���g(sh��)�����\(y��n)�Еr(sh��)����(j��)��Ҫ?ji��ng)ӑB(t��i)��׃ϵ�y(t��ng)���·�Y(ji��)��(g��u)��ʹӲ�����з֕r(sh��)��(f��)�ã���(ji��)ʡ߉�YԴ�ă�(y��u)�����ܡ��@һ���g(sh��)��fpga�I�F(xi��n)��ʹ���@�N�Ǿ��ԡ���������(d��ng)�B(t��i)ϵ�y(t��ng)������ϵ�y(t��ng)���R���g(sh��)�܉�V����(y��ng)�����T�����w�\(y��n)��(d��ng)���F(xi��n)�������^�̡����a(ch��n)�^���c��(j��ng)��(j��)����ϵ�y(t��ng)�ȸߌӴοƼ��I(l��ng)���еĎ��Џ�(qi��ng)���ɔ_�ӵ�����ϵ�y(t��ng)��(d��ng)�B(t��i)��ģ�С�
�P(gu��n)�I�~���Ǿ����c��׃��ϵ�y(t��ng)���p�ؽ�ģ�c���x���R��fpca veiiog�Z��
�ЈD���̖��tp 27 �īI(xi��n)��(bi��o)�R�a��a
1����
�ڄ�(d��ng)�B(t��i)ϵ�y(t��ng)���R�У���һ��Ǿ��Զ�׃��ϵ�y(t��ng)����ͨ�������ܵ���(qi��ng)�S�C(j��)�ɔ_���������ó�Ҏ(gu��)�����M(j��n)�б��R�����������l(w��i)���ˑB(t��i)�������ϵ�y(t��ng)�У���(hu��)�Џ�(qi��ng)��ʎ�ɔ_��̖�����ڿ���ϵ�y(t��ng)����ͨ�������ڙC(j��)����ҕ�X����(d��ng)������ϵ�y(t��ng)�����ڏ�(qi��ng)��ɔ_ͨ�^��ͨ���M(j��n)��ϵ�y(t��ng)���ȡ��ܷ���R�@Щ�Ǿ���ϵ�y(t��ng)��ͨ�����nj�(sh��)�F(xi��n)���Ƶ��P(gu��n)�I�������ܫ@�����^��(zh��n)�_��ģ�ͣ��t�y���_(d��)���A(y��)�ڵĿ���Ч���������о���(qi��ng)���ɔ_��ͨ���ı��R�������^�̼��䌍(sh��)�F(xi��n);�����M(j��n)����ϵ�y(t��ng)�M(j��n)���a(b��)������ƾ��@�÷dz���Ҫ�����˫@���@Щ����ͨ���Ą�(d��ng)�B(t��i)��ַ��̵Ĕ�(sh��)�W(xu��)ģ�ͣ�����(sh��)�F(xi��n)������(y��ng)�㷨�ęC(j��)��ƽ�_(t��i)�ھ��\(y��n)�У����������һ�N�������Ϣ̎�����g(sh��)�����p�ؽ�ģ�c���x���R���g(sh��)������(sh��)�F(xi��n)������fpca�ϵĽY(ji��)��(g��u)�O(sh��)Ӌ(j��)��
2 �Ǿ�����ͨ����ģ
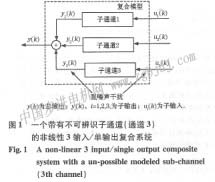
һ��(g��)�Ǿ�����ݔ�룯��ݔ����(f��)��ϵ�y(t��ng)�У�����һ��(g��)���ܺ��εز��Â��y(t��ng)�����M(j��n)�б��R��ģ����ͨ��3�����˫@���@�ͨ������ͨ��(d��ng)�B(t��i)��ַ��̔�(sh��)�W(xu��)ģ��������������^һ�N�p�ؽ�ģ�c���x���R�Y(ji��)�ϣ��Q��ddsi�������ⷽ����
ԓ��(f��)��ϵ�y(t��ng)����Dl��ʾ��
�@�N���������@�N��ݔ�룯��ݔ��ϵ�y(t��ng)�����������²��E��(g��u)�ɣ�
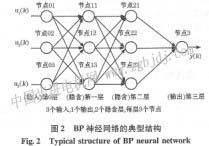
step 1��(f��)��ģ�͵Ľ���ʹ�ÿ�ݔ��Ϳ�ݔ����̖����̎�ֵ��Ӗ(x��n)����һ��(g��)bp��(j��ng)�W(w��ng)�j(lu��)���Դ���������(g��)ϵ�y(t��ng)�ď�(f��)��ģ�������������˹���(j��ng)�W(w��ng)�j(lu��)�������Ժ͏�(qi��ng)�M���������@�ӵĽ�ģ���@�óɹ���
step 2��ͨ��ݔ������ʹ�õ�i(i�քe��l��2��3)��(g��)ݔ��xi��k����������(g��)ģ�͵Ŀ�ݔ�룬��������ݔ��xj(k)(j��i)���㣬������(g��)��(f��)��ģ�ͷ��������(y��ng)��ݔ��yi(k)��������һ���l���¾Ϳɱ������ǵ�i��(g��)��ͨ����ݔ����
step 3��ͨ��ģ�͵ī@��ʹ��������һݔ��ͷ��������(y��ng)ݔ��xi(k)��yi(k)���\(y��n)��һ�N�����Ե���С���˱��R�㷨�����磬�V�x��С�����㷨�������ýY(ji��)��(g��u)���Ի��ķǾ���ģ�ͽY(ji��)��(g��u)�����Ķ��@��ᘌ�ÿ��(g��)��һ��ͨ���ĽY(ji��)��(g��u)���Ի��ķǾ��Ԅ�(d��ng)�B(t��i)��ַ��̔�(sh��)�W(xu��)ģ�͡�
step 1ʹ�õ�bp��(j��ng)�W(w��ng)�j(lu��)�Y(ji��)��(g��u)����D2��ʾ��
�D�У��[���Ӻ�ݔ���ӵ�ÿ��(g��)��(ji��)�c(di��n)�Ĕ�(sh��)�W(xu��)�������£�
�ټә�(qu��n)���
ʽ�У�iij���i�ӵ�j��(g��)��(ji��)�c(di��n)�Ŀ�ݔ��iijk���i�ӵ�j��(g��)��(ji��)�c(di��n)�ĵ�k��(g��)ݔ�룻wijk���i�ӵ�j��(g��)��(ji��)�c(di��n)���ڵ�k��(g��)ݔ��ę�(qu��n)ϵ��(sh��)��
�ڻ����(sh��)
ʽ�У�oij���i�ӵ�j��(g��)��(ji��)�c(di��n)�Ŀ�ݔ�����ڔ�(sh��)��̎�������\(y��n)������5��(g��)�c(di��n)�M(j��n)�о��Աƽ�����
���һ��(g��)��D1��ʾ�ď�(f��)��ϵ�y(t��ng)�Ļ��ڂ��y(t��ng)�ĽY(ji��)��(g��u)���Ի��ķǾ��ԏ�(f��)��ģ����������������1��(g��)��ͨ�������� |